Definition at line 26 of file autonomous_exploration.cpp.
Definition at line 62 of file autonomous_exploration.cpp.
Definition at line 66 of file autonomous_exploration.cpp.
| void AutonomousExploration::autonomousExplorationCallBack | ( | const geometry_msgs::PoseArray & | pose_msg | ) |
Definition at line 359 of file autonomous_exploration.cpp.
| void AutonomousExploration::laserScannerSignalCallBack | ( | const pr2_msgs::LaserScannerSignal | laser_scanner_signal_msg | ) |
Definition at line 325 of file autonomous_exploration.cpp.
| void AutonomousExploration::moveRobot | ( | geometry_msgs::Pose | goal_pose | ) |
Definition at line 199 of file autonomous_exploration.cpp.
| void AutonomousExploration::moveTorso | ( | double | position, |
| double | velocity, | ||
| std::string | direction | ||
| ) |
Definition at line 250 of file autonomous_exploration.cpp.
| void AutonomousExploration::onInit | ( | ) | [virtual] |
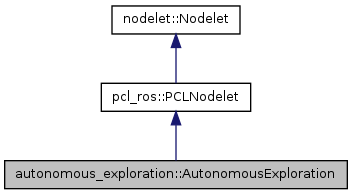
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 71 of file autonomous_exploration.cpp.
| void AutonomousExploration::pointcloudCallBack | ( | const sensor_msgs::PointCloud2 & | pointcloud_msg | ) |
Definition at line 332 of file autonomous_exploration.cpp.
Definition at line 278 of file autonomous_exploration.cpp.
Definition at line 101 of file autonomous_exploration.cpp.
double autonomous_exploration::AutonomousExploration::angle_step_ [private] |
Definition at line 56 of file autonomous_exploration.cpp.
pcl::PointCloud<pcl::PointXYZ> autonomous_exploration::AutonomousExploration::cloud_merged_ [private] |
Definition at line 59 of file autonomous_exploration.cpp.
double autonomous_exploration::AutonomousExploration::downsample_leaf_size_ [private] |
Definition at line 56 of file autonomous_exploration.cpp.
Definition at line 55 of file autonomous_exploration.cpp.
Definition at line 49 of file autonomous_exploration.cpp.
Definition at line 50 of file autonomous_exploration.cpp.
Definition at line 45 of file autonomous_exploration.cpp.
visualization_msgs::Marker autonomous_exploration::AutonomousExploration::marker_ [private] |
Definition at line 54 of file autonomous_exploration.cpp.
bool autonomous_exploration::AutonomousExploration::move_robot_ [private] |
Definition at line 55 of file autonomous_exploration.cpp.
Definition at line 46 of file autonomous_exploration.cpp.
Definition at line 44 of file autonomous_exploration.cpp.
geometry_msgs::PoseArray autonomous_exploration::AutonomousExploration::pose_msg_ [private] |
Definition at line 53 of file autonomous_exploration.cpp.
Definition at line 43 of file autonomous_exploration.cpp.
Definition at line 55 of file autonomous_exploration.cpp.
Definition at line 55 of file autonomous_exploration.cpp.
Definition at line 55 of file autonomous_exploration.cpp.
double autonomous_exploration::AutonomousExploration::rotate_amount_ [private] |
Definition at line 56 of file autonomous_exploration.cpp.
Definition at line 57 of file autonomous_exploration.cpp.
boost::thread autonomous_exploration::AutonomousExploration::spin_thread_ [private] |
Definition at line 52 of file autonomous_exploration.cpp.
Definition at line 51 of file autonomous_exploration.cpp.
Definition at line 47 of file autonomous_exploration.cpp.
ros::Publisher autonomous_exploration::AutonomousExploration::tilt_laser_traj_cmd_publisher_ [private] |
Definition at line 48 of file autonomous_exploration.cpp.
double autonomous_exploration::AutonomousExploration::wait_for_scan_ [private] |
Definition at line 56 of file autonomous_exploration.cpp.

