Kalman sensor implementation. More...
#include <Kalman.h>
Public Member Functions | |
| KalmanSensor (const KalmanSensor &k) | |
| Copy constructor. | |
| KalmanSensor (int n, int _m) | |
| Constructor. | |
| virtual void | update_H (CvMat *x_pred) |
| Method for updating how the Kalman state vector is mapped into this sensor's measurements vector. This is called from predict_update() of Kalman. Please override this method if you want this mapping to change on the run (e.g. based on time?). | |
| virtual void | update_K (CvMat *P_pred) |
| Method for updating the Kalman gain. This is called from predict_update() of Kalman. | |
| virtual void | update_P (CvMat *P_pred, CvMat *P) |
| Method for updating the error covariance matrix describing the accuracy of the state estimate. This is called from predict_update() of Kalman. | |
| ~KalmanSensor () | |
| Destructor. | |
Public Attributes | |
| CvMat * | R |
| The covariance matrix for the observation noise. | |
Protected Attributes | |
| CvMat * | P_tmp |
| CvMat * | R_tmp |
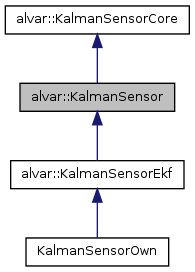
Detailed Description
Constructor & Destructor Documentation
| alvar::KalmanSensor::KalmanSensor | ( | const KalmanSensor & | k | ) |
Copy constructor.
Definition at line 116 of file Kalman.cpp.
| alvar::KalmanSensor::KalmanSensor | ( | int | n, |
| int | _m | ||
| ) |
Constructor.
- Parameters:
-
_n The number of items in the Kalman state vector _m The number of measurements given by this sensor
Definition at line 122 of file Kalman.cpp.
Destructor.
Definition at line 128 of file Kalman.cpp.
Member Function Documentation
| virtual void alvar::KalmanSensor::update_H | ( | CvMat * | x_pred | ) | [inline, virtual] |
Method for updating how the Kalman state vector is mapped into this sensor's measurements vector. This is called from predict_update() of Kalman. Please override this method if you want this mapping to change on the run (e.g. based on time?).
Reimplemented in alvar::KalmanSensorEkf.
| void alvar::KalmanSensor::update_K | ( | CvMat * | P_pred | ) | [virtual] |
Method for updating the Kalman gain. This is called from predict_update() of Kalman.
Definition at line 134 of file Kalman.cpp.
| void alvar::KalmanSensor::update_P | ( | CvMat * | P_pred, |
| CvMat * | P | ||
| ) | [virtual] |
Method for updating the error covariance matrix describing the accuracy of the state estimate. This is called from predict_update() of Kalman.
Definition at line 145 of file Kalman.cpp.
Member Data Documentation
CvMat* alvar::KalmanSensor::P_tmp [protected] |
| CvMat* alvar::KalmanSensor::R |
CvMat* alvar::KalmanSensor::R_tmp [protected] |
The documentation for this class was generated from the following files: