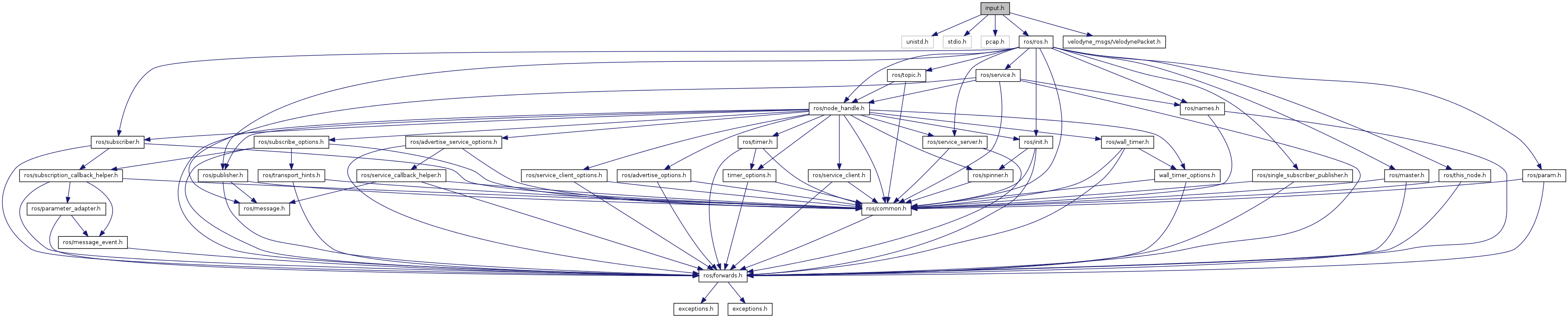
#include <unistd.h>#include <stdio.h>#include <pcap.h>#include <ros/ros.h>#include <velodyne_msgs/VelodynePacket.h>
Include dependency graph for input.h:
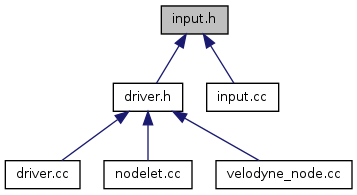
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | velodyne_driver::Input |
| Pure virtual Velodyne input base class. More... | |
| class | velodyne_driver::InputPCAP |
| Velodyne input from PCAP dump file. More... | |
| class | velodyne_driver::InputSocket |
| Live Velodyne input from socket. More... | |
Namespaces | |
| namespace | velodyne_driver |
Variables | |
| static uint16_t | velodyne_driver::UDP_PORT_NUMBER = 2368 |
Detailed Description
Velodyne 3D LIDAR data input classes
These classes provide raw Velodyne LIDAR input packets from either a live socket interface or a previously-saved PCAP dump file.
Classes:
velodyne::Input -- pure virtual base class to access the data independently of its source
velodyne::InputSocket -- derived class reads live data from the device via a UDP socket
velodyne::InputPCAP -- derived class provides a similar interface from a PCAP dump file
Definition in file input.h.