#include <boost/bind.hpp>#include <ros/ros.h>#include <turtlesim/Pose.h>#include <turtlesim/Velocity.h>#include <std_srvs/Empty.h>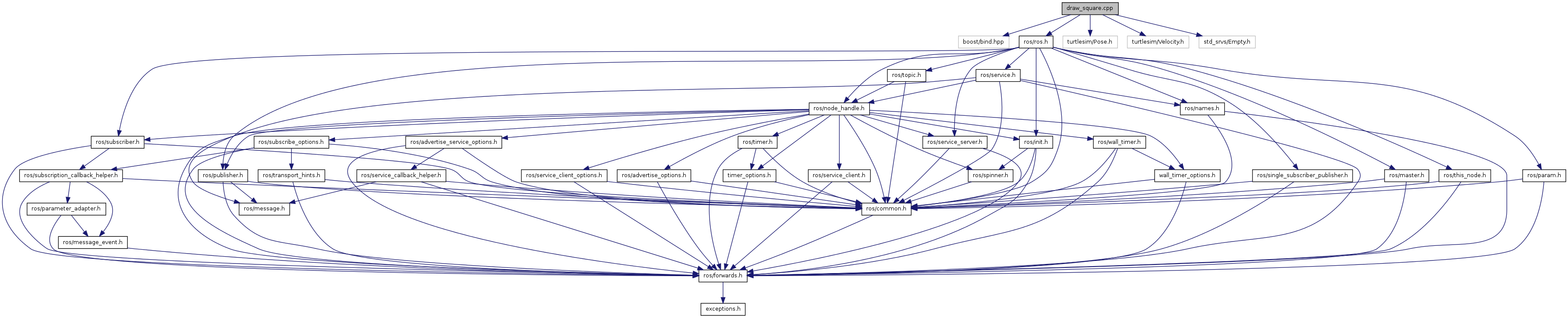
Go to the source code of this file.
Defines | |
| #define | PI 3.141592 |
Enumerations | |
| enum | State { FORWARD, STOP_FORWARD, TURN, STOP_TURN } |
Functions | |
| void | commandTurtle (ros::Publisher vel_pub, float linear, float angular) |
| void | forward (ros::Publisher vel_pub) |
| bool | hasReachedGoal () |
| bool | hasStopped () |
| int | main (int argc, char **argv) |
| void | poseCallback (const turtlesim::PoseConstPtr &pose) |
| void | printGoal () |
| void | stopForward (ros::Publisher vel_pub) |
| void | stopTurn (ros::Publisher vel_pub) |
| void | timerCallback (const ros::TimerEvent &, ros::Publisher vel_pub) |
| void | turn (ros::Publisher vel_pub) |
Variables | |
| bool | g_first_goal_set = false |
| turtlesim::Pose | g_goal |
| State | g_last_state = FORWARD |
| turtlesim::PoseConstPtr | g_pose |
| State | g_state = FORWARD |
Define Documentation
| #define PI 3.141592 |
Definition at line 22 of file draw_square.cpp.
Enumeration Type Documentation
| enum State |
Definition at line 10 of file draw_square.cpp.
Function Documentation
| void commandTurtle | ( | ros::Publisher | vel_pub, |
| float | linear, | ||
| float | angular | ||
| ) |
Definition at line 44 of file draw_square.cpp.
| void forward | ( | ros::Publisher | vel_pub | ) |
Definition at line 87 of file draw_square.cpp.
| bool hasReachedGoal | ( | ) |
Definition at line 29 of file draw_square.cpp.
| bool hasStopped | ( | ) |
Definition at line 34 of file draw_square.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 148 of file draw_square.cpp.
| void poseCallback | ( | const turtlesim::PoseConstPtr & | pose | ) |
Definition at line 24 of file draw_square.cpp.
| void printGoal | ( | ) |
Definition at line 39 of file draw_square.cpp.
| void stopForward | ( | ros::Publisher | vel_pub | ) |
Definition at line 52 of file draw_square.cpp.
| void stopTurn | ( | ros::Publisher | vel_pub | ) |
Definition at line 69 of file draw_square.cpp.
| void timerCallback | ( | const ros::TimerEvent & | , |
| ros::Publisher | vel_pub | ||
| ) |
Definition at line 113 of file draw_square.cpp.
| void turn | ( | ros::Publisher | vel_pub | ) |
Definition at line 100 of file draw_square.cpp.
Variable Documentation
| bool g_first_goal_set = false |
Definition at line 20 of file draw_square.cpp.
| turtlesim::Pose g_goal |
Definition at line 8 of file draw_square.cpp.
Definition at line 19 of file draw_square.cpp.
| turtlesim::PoseConstPtr g_pose |
Definition at line 7 of file draw_square.cpp.
Definition at line 18 of file draw_square.cpp.