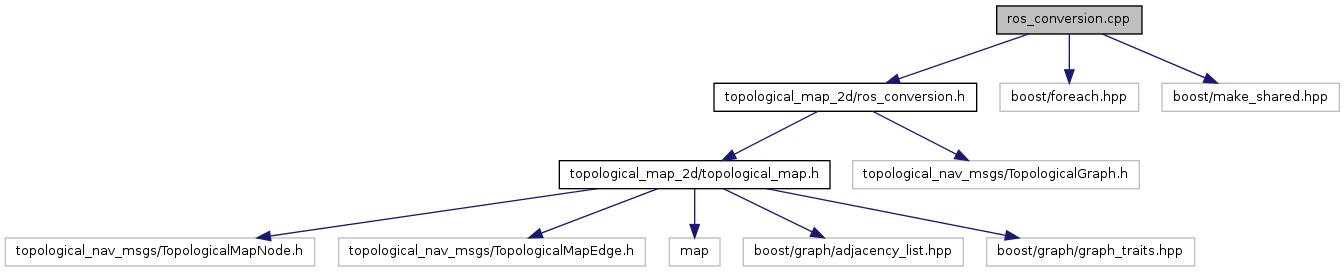
#include <topological_map_2d/ros_conversion.h>#include <boost/foreach.hpp>#include <boost/make_shared.hpp>
Include dependency graph for ros_conversion.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | topological_map_2d |
Functions | |
| TopologicalMap | topological_map_2d::fromMessage (const msg::TopologicalGraph &m) |
| Convert TopologicalGraph2D message to TopologicalMap. | |
| msg::TopologicalGraph::Ptr | topological_map_2d::toMessage (const TopologicalMap &g) |
| Convert TopologicalMap to ROS TopologicalGraph2D message. | |
Detailed Description
Implementation of ros_conversion.h
Definition in file ros_conversion.cpp.