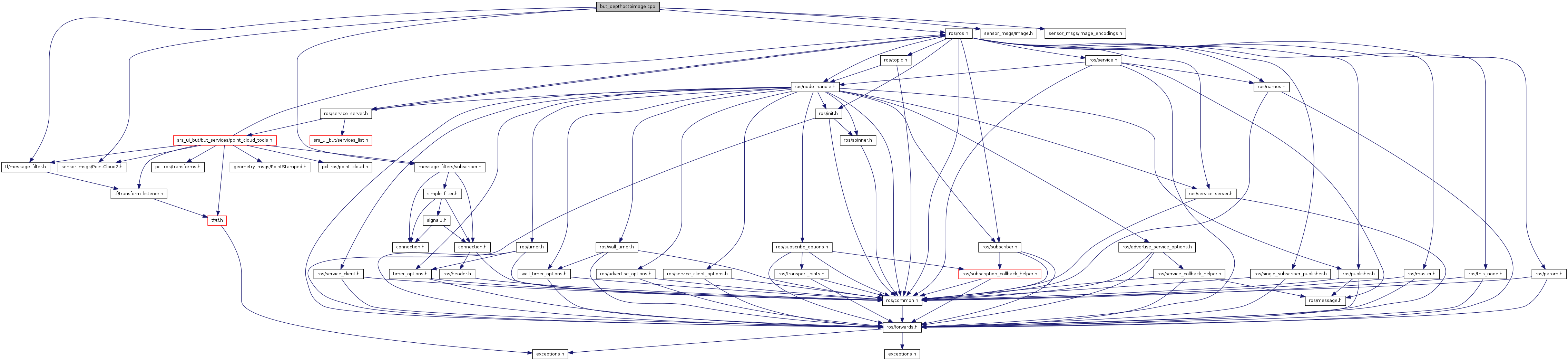
#include "ros/ros.h"#include <message_filters/subscriber.h>#include <sensor_msgs/PointCloud2.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/image_encodings.h>#include <tf/message_filter.h>
Include dependency graph for but_depthpctoimage.cpp:
Go to the source code of this file.
Classes | |
| class | srs_ui_but::CPCTransformer |
Namespaces | |
| namespace | srs_ui_but |
Defines | |
| #define | IMAGE_TOPIC_NAME std::string("/srs_ui_but/depth/image") |
| #define | POINTCLOUD_TOPIC_NAME std::string("/cam3d/depth/points") |
Functions | |
| int | main (int argc, char **argv) |
Define Documentation
| #define IMAGE_TOPIC_NAME std::string("/srs_ui_but/depth/image") |
Definition at line 36 of file but_depthpctoimage.cpp.
| #define POINTCLOUD_TOPIC_NAME std::string("/cam3d/depth/points") |
Definition at line 35 of file but_depthpctoimage.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Main function
Definition at line 196 of file but_depthpctoimage.cpp.