This is a library that offers a simple interface to send commands to hand joints. It is compatible with the Shadow Robot CAN hand and ethercat hand. It allows the user not worry about the name of the currently running controllers. Only position control is allowed (targets must represent angles). More...
#include <sr_hand/hand_commander.hpp>#include <pr2_mechanism_msgs/ListControllers.h>#include <sr_robot_msgs/sendupdate.h>#include <std_msgs/Float64.h>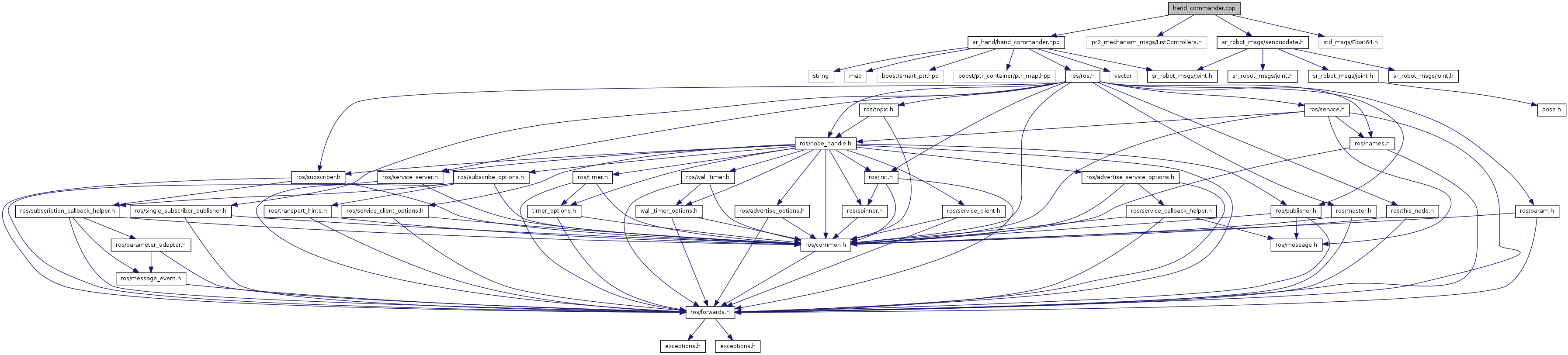
Go to the source code of this file.
Namespaces | |
| namespace | shadowrobot |
Detailed Description
This is a library that offers a simple interface to send commands to hand joints. It is compatible with the Shadow Robot CAN hand and ethercat hand. It allows the user not worry about the name of the currently running controllers. Only position control is allowed (targets must represent angles).
- Date:
- Thu Nov 08 15:34:37 2012
Copyright 2011 Shadow Robot Company Ltd.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>.
Definition in file hand_commander.cpp.