This file contains interface to #SDH::cDSA, a class to communicate with the tactile sensors of the SDH. More...
#include "sdhlibrary_settings.h"#include <assert.h>#include "sdhexception.h"#include "dbg.h"#include "rs232-cygwin.h"#include "simpletime.h"#include "crc.h"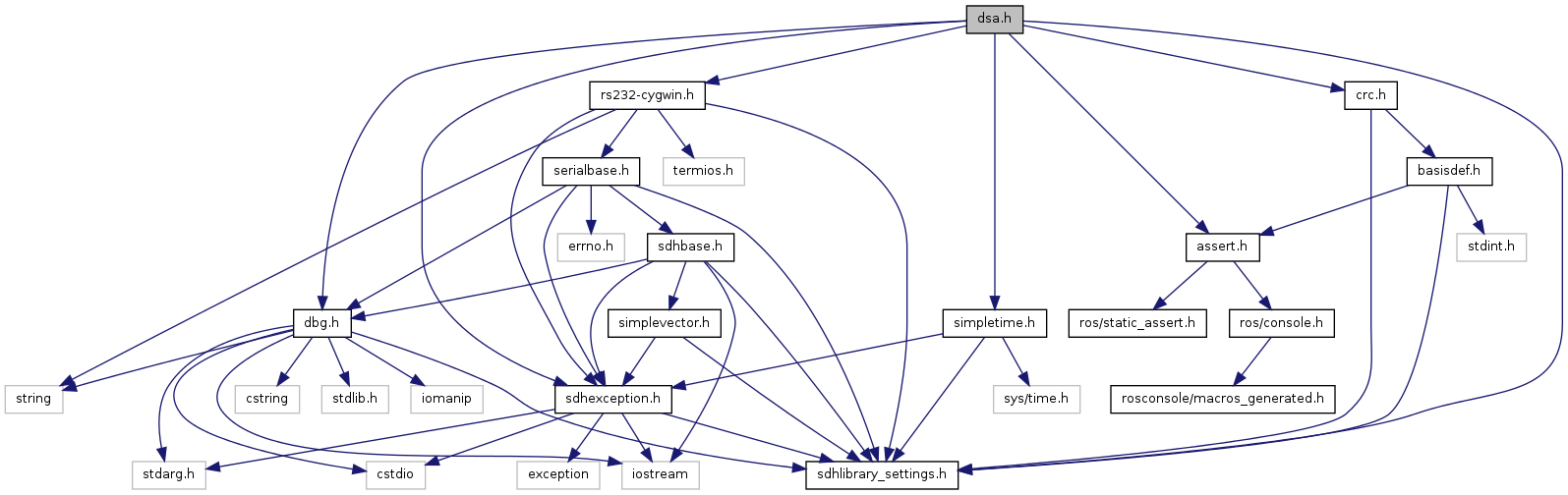
Go to the source code of this file.
Classes | |
| class | cDSA |
| SDH::cDSA is the end user interface class to access the DSACON32m, the tactile sensor controller of the SDH. More... | |
| class | cDSAException |
| Derived exception class for low-level DSA related exceptions. More... | |
| struct | cDSA::sContactInfo |
| Structure to hold info about the contact of one sensor patch. More... | |
| struct | cDSA::sControllerInfo |
| A data structure describing the controller info about the remote DSACON32m controller. More... | |
| struct | cDSA::sMatrixInfo |
| A data structure describing a single sensor matrix connected to the remote DSACON32m controller. More... | |
| struct | cDSA::sResponse |
| data structure for storing responses from the remote DSACON32m controller More... | |
| struct | cDSA::sSensitivityInfo |
| Structure to hold info about the sensitivity settings of one sensor patch. More... | |
| struct | cDSA::sSensorInfo |
| A data structure describing the sensor info about the remote DSACON32m controller. More... | |
| struct | cDSA::sTactileSensorFrame |
| A data structure describing a full tactile sensor frame read from the remote DSACON32m controller. More... | |
Defines | |
| #define | DSA_MAX_PREAMBLE_SEARCH (2*3*(6*(14+13)) + 16) |
Functions | |
| VCC_EXPORT std::ostream & | operator<< (std::ostream &stream, cDSA::sControllerInfo const &controller_info) |
| VCC_EXPORT std::ostream & | operator<< (std::ostream &stream, cDSA::sSensorInfo const &sensor_info) |
| VCC_EXPORT std::ostream & | operator<< (std::ostream &stream, cDSA::sMatrixInfo const &matrix_info) |
| VCC_EXPORT std::ostream & | operator<< (std::ostream &stream, cDSA::sResponse const &response) |
| VCC_EXPORT std::ostream & | operator<< (std::ostream &stream, cDSA const &dsa) |
| sResponse (UInt8 *_payload, int _max_payload_size) | |
| constructor to init pointer and max size | |
Variables | |
| UInt8 | active_interface |
| UInt8 | adj_flags |
| UInt32 | can_baudrate |
| UInt16 | can_id |
| UInt16 | cells_x |
| UInt16 | cells_y |
| float | cur_sens |
| UInt16 | error_code |
| 0000h, if successful, otherwise error code | |
| float | fact_sens |
| UInt8 | feature_flags |
| float | fullscale |
| UInt16 | generated_by |
| UInt8 | hw_revision |
| UInt8 | hw_version |
| float | matrix_center_x |
| float | matrix_center_y |
| float | matrix_center_z |
| float | matrix_theta_x |
| float | matrix_theta_y |
| float | matrix_theta_z |
| Int32 | max_payload_size |
| UInt16 | nb_matrices |
| UInt8 | packet_id |
| UInt8 * | payload |
| UInt8 | reserved [2] |
| UInt8 | senscon_type |
| UInt32 | serial_no |
| UInt16 | size |
| UInt8 | status_flags |
| UInt16 | sw_version |
| float | texel_height |
| float | texel_width |
| UInt8 | uid [6] |
This file contains interface to #SDH::cDSA, a class to communicate with the tactile sensors of the SDH.
Copyright (c) 2008 SCHUNK GmbH & Co. KG
Definition in file dsa.h.
| #define DSA_MAX_PREAMBLE_SEARCH (2*3*(6*(14+13)) + 16) |
| VCC_EXPORT std::ostream& operator<< | ( | std::ostream & | stream, |
| cDSA::sControllerInfo const & | controller_info | ||
| ) |
| VCC_EXPORT std::ostream& operator<< | ( | std::ostream & | stream, |
| cDSA::sSensorInfo const & | sensor_info | ||
| ) |
| VCC_EXPORT std::ostream& operator<< | ( | std::ostream & | stream, |
| cDSA::sMatrixInfo const & | matrix_info | ||
| ) |
| VCC_EXPORT std::ostream& operator<< | ( | std::ostream & | stream, |
| cDSA::sResponse const & | response | ||
| ) |
| VCC_EXPORT std::ostream& operator<< | ( | std::ostream & | stream, |
| cDSA const & | dsa | ||
| ) |
| SDH__attribute__::sResponse | ( | UInt8 * | _payload, |
| int | _max_payload_size | ||
| ) |
| float cur_sens |
| float fact_sens |
| float matrix_center_x |
| float matrix_center_y |
| float matrix_center_z |
| float matrix_theta_x |
| float matrix_theta_y |
| float matrix_theta_z |
| float texel_height |
| float texel_width |

