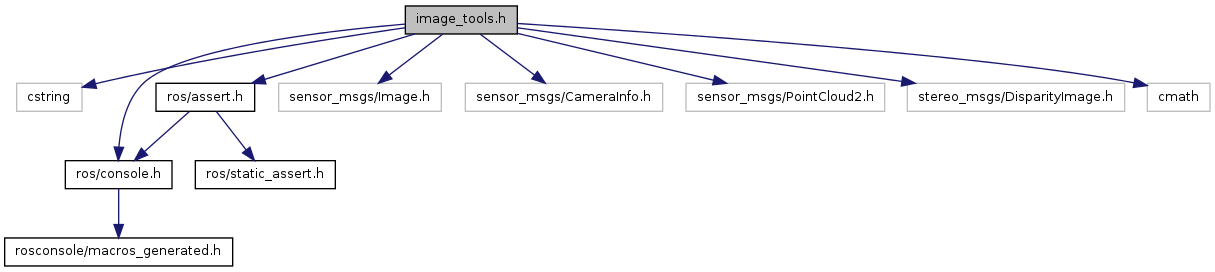
#include <cstring>#include <ros/console.h>#include <ros/assert.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/CameraInfo.h>#include <sensor_msgs/PointCloud2.h>#include <stereo_msgs/DisparityImage.h>#include <cmath>
Include dependency graph for image_tools.h:
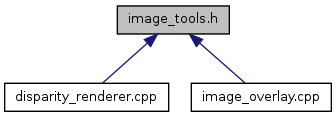
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | rviz_interaction_tools |
Functions | |
| void | rviz_interaction_tools::getPoint (const sensor_msgs::PointCloud2 &cloud, unsigned int h, unsigned int w, float &x, float &y, float &z) |
| Get a point as three floats from a dense point cloud using image coordinates. | |
| void | rviz_interaction_tools::getPoint (const stereo_msgs::DisparityImage &disparity_image, const sensor_msgs::CameraInfo &camera_info, unsigned int h, unsigned int w, float &x, float &y, float &z) |
| Get the 3D coordinates of a point given its image coordinates and the disparity image. | |
| void | rviz_interaction_tools::getValue (const sensor_msgs::Image &image, unsigned int h, unsigned int w, float &val) |
| Get the value from an image at given image coordinates as a float. | |
| bool | rviz_interaction_tools::hasDisparityValue (const stereo_msgs::DisparityImage &disparity_image, unsigned int h, unsigned int w) |
| Check if a disparity image as a valid value at given image coordinates. | |
| bool | rviz_interaction_tools::hasPoint (const sensor_msgs::PointCloud2 &cloud, unsigned int h, unsigned int w) |
| Check if a dense point cloud has a point at given image coordinates. | |
| bool | rviz_interaction_tools::hasPoint (const sensor_msgs::Image &image, unsigned int h, unsigned int w) |
| Check if an image has a value at given image coordinates that is not inf or nan. | |
| void | rviz_interaction_tools::projectTo3d (float u, float v, float disparity, const stereo_msgs::DisparityImage &disparity_image, const sensor_msgs::CameraInfo &camera_info, float &x, float &y, float &z) |
| void | rviz_interaction_tools::setValue (sensor_msgs::Image &image, unsigned int h, unsigned int w, float val) |
| Set the value from an image at given image coordinates as a float. | |