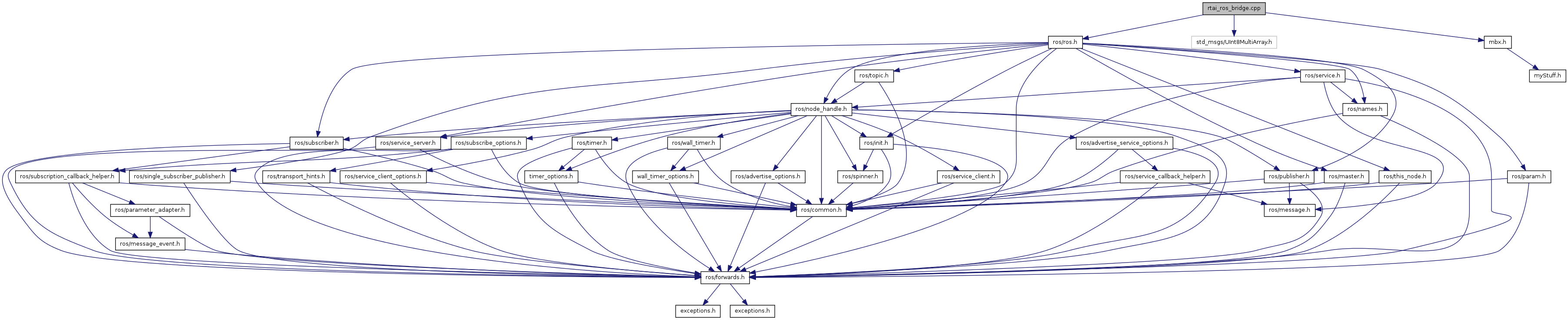
Go to the source code of this file.
Defines | |
| #define | MAILBOX_NAME_IN "DRIMBX" |
| #define | MAILBOX_NAME_OUT "DROMBX" |
| #define | SAMPLETIME 500 /* must correspond to base time of Simulink/RTW target */ |
| #define | TASKNAME "ROSTSK" |
Functions | |
| int | initializeRTMBX (void) |
| int | main (int argc, char **argv) |
| void | rtaiDataCallback (const std_msgs::UInt8MultiArray rtaiData) |
| int | terminateRTMBX (void) |
Variables | |
| int | closingMbxFlagI = 0 |
| int | closingMbxFlagO = 0 |
| MBX * | mbxI |
| MBX * | mbxO |
| static RT_TASK * | mytask |
Define Documentation
| #define MAILBOX_NAME_IN "DRIMBX" |
Definition at line 11 of file rtai_ros_bridge.cpp.
| #define MAILBOX_NAME_OUT "DROMBX" |
Definition at line 14 of file rtai_ros_bridge.cpp.
| #define SAMPLETIME 500 /* must correspond to base time of Simulink/RTW target */ |
Definition at line 17 of file rtai_ros_bridge.cpp.
| #define TASKNAME "ROSTSK" |
Definition at line 8 of file rtai_ros_bridge.cpp.
Function Documentation
| int initializeRTMBX | ( | void | ) |
Definition at line 86 of file rtai_ros_bridge.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 45 of file rtai_ros_bridge.cpp.
| void rtaiDataCallback | ( | const std_msgs::UInt8MultiArray | rtaiData | ) |
This node publishes data received via a mailbox from RTAI and puts data into the mailbox subscribed by the noce
Definition at line 35 of file rtai_ros_bridge.cpp.
| int terminateRTMBX | ( | void | ) |
Definition at line 129 of file rtai_ros_bridge.cpp.
Variable Documentation
| int closingMbxFlagI = 0 |
Definition at line 23 of file rtai_ros_bridge.cpp.
| int closingMbxFlagO = 0 |
Definition at line 24 of file rtai_ros_bridge.cpp.
| MBX* mbxI |
Definition at line 22 of file rtai_ros_bridge.cpp.
| MBX * mbxO |
Definition at line 22 of file rtai_ros_bridge.cpp.
RT_TASK* mytask [static] |
Definition at line 20 of file rtai_ros_bridge.cpp.