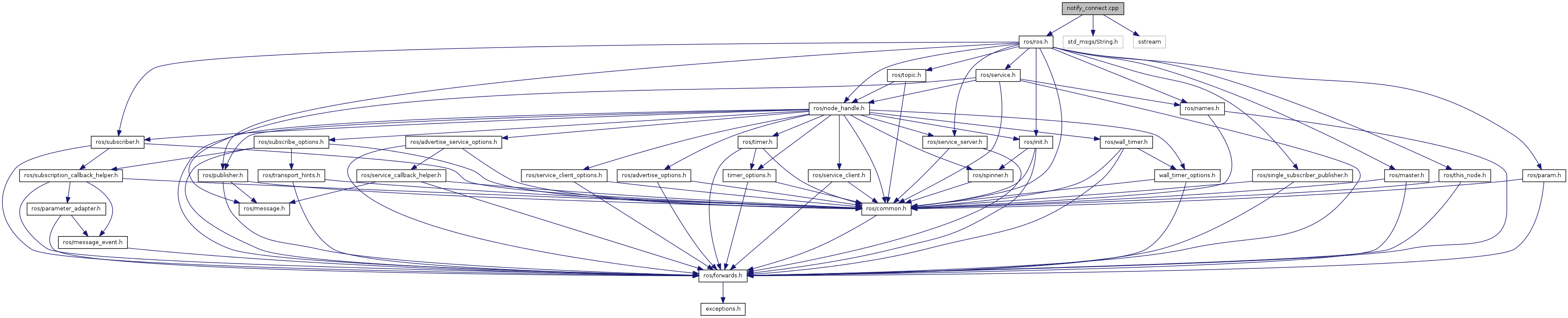
Include dependency graph for notify_connect.cpp:
Go to the source code of this file.
Functions | |
| void | chatterConnect (const ros::SingleSubscriberPublisher &pub) |
| void | chatterDisconnect (const ros::SingleSubscriberPublisher &) |
| int | main (int argc, char **argv) |
Variables | |
| uint32_t | g_count = 0 |
Function Documentation
| void chatterConnect | ( | const ros::SingleSubscriberPublisher & | pub | ) |
Definition at line 40 of file notify_connect.cpp.
| void chatterDisconnect | ( | const ros::SingleSubscriberPublisher & | ) |
Definition at line 51 of file notify_connect.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
This version of advertise() optionally takes a connect/disconnect callback
Definition at line 56 of file notify_connect.cpp.
Variable Documentation
| uint32_t g_count = 0 |
This tutorial demonstrates how to get a callback when a new subscriber connects to an advertised topic, or a subscriber disconnects.
Definition at line 38 of file notify_connect.cpp.