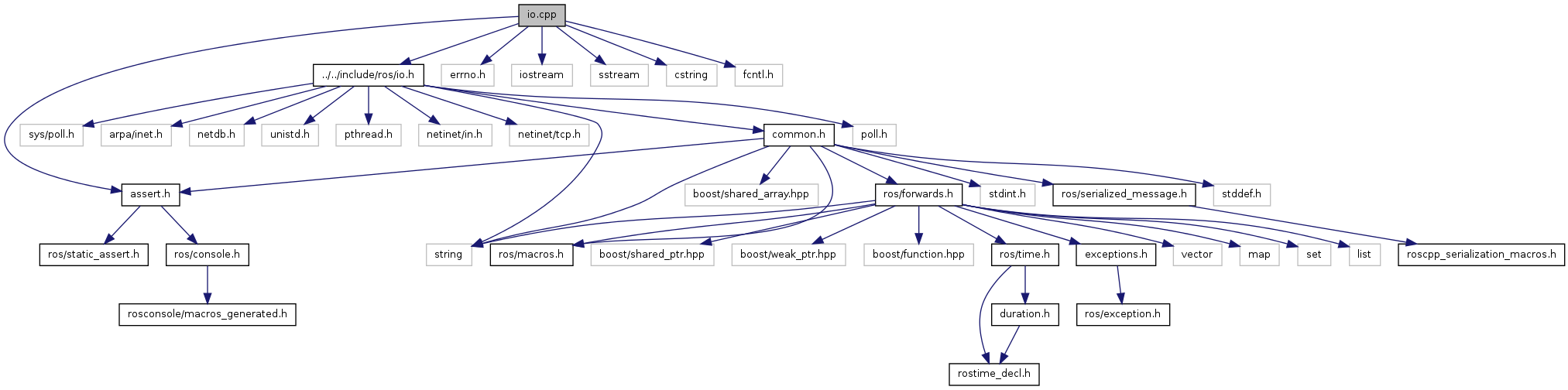
#include "../../include/ros/io.h"#include <ros/assert.h>#include <errno.h>#include <iostream>#include <sstream>#include <cstring>#include <fcntl.h>
Include dependency graph for io.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | ros |
Functions | |
| ROSCPP_DECL int | ros::close_socket (socket_fd_t &socket) |
| Close the socket. | |
| ROSCPP_DECL int | ros::create_signal_pair (signal_fd_t signal_pair[2]) |
| ROSCPP_DECL int | ros::last_socket_error () |
| ROSCPP_DECL bool | ros::last_socket_error_is_would_block () |
| ROSCPP_DECL const char * | ros::last_socket_error_string () |
| ROSCPP_DECL int | ros::poll_sockets (socket_pollfd *fds, nfds_t nfds, int timeout) |
| A cross platform polling function for sockets. | |
| ROSCPP_DECL int | ros::set_non_blocking (socket_fd_t &socket) |