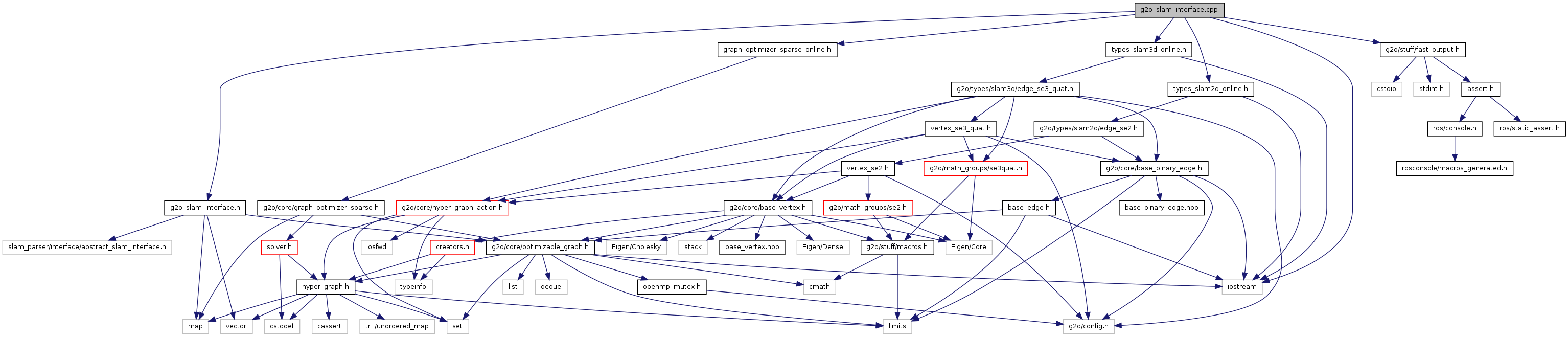
#include "g2o_slam_interface.h"#include "g2o/stuff/fast_output.h"#include "types_slam2d_online.h"#include "types_slam3d_online.h"#include "graph_optimizer_sparse_online.h"#include <iostream>
Include dependency graph for g2o_slam_interface.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | g2o |
Executes code, only if secs are gone since last exec. | |
Functions | |
| Eigen::Quaterniond | g2o::euler_to_quat (double yaw, double pitch, double roll) |
| void | g2o::jac_quat3_euler3 (Eigen::Matrix< double, 6, 6 > &J, const SE3Quat &t) |
| void | g2o::quat_to_euler (Eigen::Quaterniond q, double &yaw, double &pitch, double &roll) |