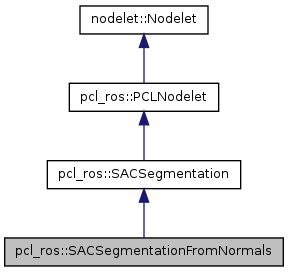
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation. More...
#include <sac_segmentation.h>
Public Member Functions | |
| std::string | getInputTFframe () |
| Get the TF frame the input PointCloud should be transformed into before processing. | |
| std::string | getOutputTFframe () |
| Get the TF frame the PointCloud should be transformed into after processing. | |
| void | setInputTFframe (std::string tf_frame) |
| Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different. | |
| void | setOutputTFframe (std::string tf_frame) |
| Set the output TF frame the data should be transformed into after processing. | |
Protected Member Functions | |
| void | axis_callback (const pcl::ModelCoefficientsConstPtr &model) |
| Model callback. | |
| void | config_callback (SACSegmentationFromNormalsConfig &config, uint32_t level) |
| Dynamic reconfigure callback. | |
| void | input_callback (const PointCloudConstPtr &cloud) |
| Input point cloud callback. Because we want to use the same synchronizer object, we push back empty elements with the same timestamp. | |
| void | input_normals_indices_callback (const PointCloudConstPtr &cloud, const PointCloudNConstPtr &cloud_normals, const PointIndicesConstPtr &indices) |
| Input point cloud callback. | |
| virtual void | onInit () |
| Nodelet initialization routine. | |
Protected Attributes | |
| message_filters::PassThrough < PointIndices > | nf_ |
| Null passthrough filter, used for pushing empty elements in the synchronizer. | |
| boost::shared_ptr < dynamic_reconfigure::Server < SACSegmentationFromNormalsConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. | |
| ros::Subscriber | sub_axis_ |
| The input PointCloud subscriber. | |
| message_filters::Subscriber < PointCloudN > | sub_normals_filter_ |
| The normals PointCloud subscriber filter. | |
| std::string | tf_input_frame_ |
| The input TF frame the data should be transformed into, if input.header.frame_id is different. | |
| std::string | tf_input_orig_frame_ |
| The original data input TF frame. | |
| std::string | tf_output_frame_ |
| The output TF frame the data should be transformed into, if input.header.frame_id is different. | |
Private Types | |
| typedef pcl::PointCloud < pcl::PointXYZ > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef pcl::PointCloud < pcl::Normal > | PointCloudN |
| typedef PointCloudN::ConstPtr | PointCloudNConstPtr |
| typedef PointCloudN::Ptr | PointCloudNPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Private Attributes | |
| pcl::SACSegmentationFromNormals < pcl::PointXYZ, pcl::Normal > | impl_ |
| The PCL implementation used. | |
| boost::mutex | mutex_ |
| Internal mutex. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ApproximateTime < PointCloud, PointCloudN, PointIndices > > > | sync_input_normals_indices_a_ |
| Synchronized input, normals, and indices. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ExactTime < PointCloud, PointCloudN, PointIndices > > > | sync_input_normals_indices_e_ |
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation.
Definition at line 177 of file sac_segmentation.h.
typedef pcl::PointCloud<pcl::PointXYZ> pcl_ros::SACSegmentationFromNormals::PointCloud [private] |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 179 of file sac_segmentation.h.
typedef PointCloud::ConstPtr pcl_ros::SACSegmentationFromNormals::PointCloudConstPtr [private] |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 181 of file sac_segmentation.h.
typedef pcl::PointCloud<pcl::Normal> pcl_ros::SACSegmentationFromNormals::PointCloudN [private] |
Definition at line 183 of file sac_segmentation.h.
typedef PointCloudN::ConstPtr pcl_ros::SACSegmentationFromNormals::PointCloudNConstPtr [private] |
Definition at line 185 of file sac_segmentation.h.
typedef PointCloudN::Ptr pcl_ros::SACSegmentationFromNormals::PointCloudNPtr [private] |
Definition at line 184 of file sac_segmentation.h.
typedef PointCloud::Ptr pcl_ros::SACSegmentationFromNormals::PointCloudPtr [private] |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 180 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::axis_callback | ( | const pcl::ModelCoefficientsConstPtr & | model | ) | [protected] |
Model callback.
| model | the sample consensus model found |
Definition at line 456 of file sac_segmentation.cpp.
| void pcl_ros::SACSegmentationFromNormals::config_callback | ( | SACSegmentationFromNormalsConfig & | config, |
| uint32_t | level | ||
| ) | [protected] |
Dynamic reconfigure callback.
| config | the config object |
| level | the dynamic reconfigure level |
Definition at line 473 of file sac_segmentation.cpp.
| std::string pcl_ros::SACSegmentationFromNormals::getInputTFframe | ( | ) | [inline] |
Get the TF frame the input PointCloud should be transformed into before processing.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 194 of file sac_segmentation.h.
| std::string pcl_ros::SACSegmentationFromNormals::getOutputTFframe | ( | ) | [inline] |
Get the TF frame the PointCloud should be transformed into after processing.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 202 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::input_callback | ( | const PointCloudConstPtr & | cloud | ) | [inline, protected] |
Input point cloud callback. Because we want to use the same synchronizer object, we push back empty elements with the same timestamp.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 220 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::input_normals_indices_callback | ( | const PointCloudConstPtr & | cloud, |
| const PointCloudNConstPtr & | cloud_normals, | ||
| const PointIndicesConstPtr & | indices | ||
| ) | [protected] |
Input point cloud callback.
| cloud | the pointer to the input point cloud |
| cloud_normals | the pointer to the input point cloud normals |
| indices | the pointer to the input point cloud indices |
DEBUG
Definition at line 539 of file sac_segmentation.cpp.
| void pcl_ros::SACSegmentationFromNormals::onInit | ( | ) | [protected, virtual] |
Nodelet initialization routine.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 336 of file sac_segmentation.cpp.
| void pcl_ros::SACSegmentationFromNormals::setInputTFframe | ( | std::string | tf_frame | ) | [inline] |
Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different.
| tf_frame | the TF frame the input PointCloud should be transformed into before processing |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 191 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::setOutputTFframe | ( | std::string | tf_frame | ) | [inline] |
Set the output TF frame the data should be transformed into after processing.
| tf_frame | the TF frame the PointCloud should be transformed into after processing |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 199 of file sac_segmentation.h.
pcl::SACSegmentationFromNormals<pcl::PointXYZ, pcl::Normal> pcl_ros::SACSegmentationFromNormals::impl_ [private] |
The PCL implementation used.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 266 of file sac_segmentation.h.
boost::mutex pcl_ros::SACSegmentationFromNormals::mutex_ [private] |
Internal mutex.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 263 of file sac_segmentation.h.
Null passthrough filter, used for pushing empty elements in the synchronizer.
Definition at line 229 of file sac_segmentation.h.
boost::shared_ptr<dynamic_reconfigure::Server<SACSegmentationFromNormalsConfig> > pcl_ros::SACSegmentationFromNormals::srv_ [protected] |
Pointer to a dynamic reconfigure service.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 213 of file sac_segmentation.h.
The input PointCloud subscriber.
Definition at line 210 of file sac_segmentation.h.
message_filters::Subscriber<PointCloudN> pcl_ros::SACSegmentationFromNormals::sub_normals_filter_ [protected] |
The normals PointCloud subscriber filter.
Definition at line 207 of file sac_segmentation.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ApproximateTime<PointCloud, PointCloudN, PointIndices> > > pcl_ros::SACSegmentationFromNormals::sync_input_normals_indices_a_ [private] |
Synchronized input, normals, and indices.
Definition at line 269 of file sac_segmentation.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ExactTime<PointCloud, PointCloudN, PointIndices> > > pcl_ros::SACSegmentationFromNormals::sync_input_normals_indices_e_ [private] |
Definition at line 270 of file sac_segmentation.h.
std::string pcl_ros::SACSegmentationFromNormals::tf_input_frame_ [protected] |
The input TF frame the data should be transformed into, if input.header.frame_id is different.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 232 of file sac_segmentation.h.
std::string pcl_ros::SACSegmentationFromNormals::tf_input_orig_frame_ [protected] |
The original data input TF frame.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 234 of file sac_segmentation.h.
std::string pcl_ros::SACSegmentationFromNormals::tf_output_frame_ [protected] |
The output TF frame the data should be transformed into, if input.header.frame_id is different.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 236 of file sac_segmentation.h.

