#include <AmtecProtocolArm.h>
Public Member Functions | |
| virtual int | ackJoint (IDType id) |
| AmtecProtocolArm (IDType id_offset=20) | |
| virtual int | emergencyStopJoint (IDType id) |
| const AmtecManipulator & | getManipulator () const |
| virtual float | getMaxCurrent (IDType id) |
| virtual void | getModuleStatus (int module_id, uint8_t &referenced, uint8_t &moving, uint8_t &progMode, uint8_t &warning, uint8_t &error, uint8_t &brake, uint8_t &moveEnd, uint8_t &posReached, uint8_t &errorCode, float ¤t) |
| virtual float | getPosition (IDType id) |
| virtual float | getVelocity (IDType id) |
| virtual void | init () |
| virtual int | movePosition (IDType id, float position) |
| virtual int | movePositionDuration (IDType id, float position, uint16_t msecs) |
| virtual int | moveVelocity (IDType id, float velocity) |
| virtual int | normalStopJoint (IDType id) |
| virtual int | refJoint (IDType id) |
| virtual int | setAcceleration (IDType id, float acceleration) |
| virtual int | setCurrent (IDType id, float current) |
| virtual int | setVelocity (IDType id, float velocity) |
Protected Attributes | |
| AmtecManipulator | manipulator_ |
Detailed Description
Definition at line 20 of file AmtecProtocolArm.h.
Constructor & Destructor Documentation
| AmtecProtocolArm::AmtecProtocolArm | ( | IDType | id_offset = 20 | ) | [inline] |
Definition at line 22 of file AmtecProtocolArm.h.
Member Function Documentation
| virtual int AmtecProtocolArm::ackJoint | ( | IDType | id | ) | [inline, virtual] |
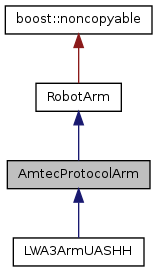
Implements RobotArm.
Reimplemented in LWA3ArmUASHH.
Definition at line 46 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::emergencyStopJoint | ( | IDType | id | ) | [inline, virtual] |
Implements RobotArm.
Definition at line 37 of file AmtecProtocolArm.h.
| const AmtecManipulator& AmtecProtocolArm::getManipulator | ( | ) | const [inline] |
Definition at line 106 of file AmtecProtocolArm.h.
| virtual float AmtecProtocolArm::getMaxCurrent | ( | IDType | id | ) | [inline, virtual] |
Implements RobotArm.
Definition at line 61 of file AmtecProtocolArm.h.
| virtual void AmtecProtocolArm::getModuleStatus | ( | int | module_id, |
| uint8_t & | referenced, | ||
| uint8_t & | moving, | ||
| uint8_t & | progMode, | ||
| uint8_t & | warning, | ||
| uint8_t & | error, | ||
| uint8_t & | brake, | ||
| uint8_t & | moveEnd, | ||
| uint8_t & | posReached, | ||
| uint8_t & | errorCode, | ||
| float & | current | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 88 of file AmtecProtocolArm.h.
| virtual float AmtecProtocolArm::getPosition | ( | IDType | id | ) | [inline, virtual] |
Implements RobotArm.
Definition at line 55 of file AmtecProtocolArm.h.
| virtual float AmtecProtocolArm::getVelocity | ( | IDType | id | ) | [inline, virtual] |
Implements RobotArm.
Definition at line 58 of file AmtecProtocolArm.h.
| virtual void AmtecProtocolArm::init | ( | ) | [inline, virtual] |
Implements RobotArm.
Reimplemented in LWA3ArmUASHH.
Definition at line 25 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::movePosition | ( | IDType | id, |
| float | position | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 76 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::movePositionDuration | ( | IDType | id, |
| float | position, | ||
| uint16_t | msecs | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 79 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::moveVelocity | ( | IDType | id, |
| float | velocity | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 82 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::normalStopJoint | ( | IDType | id | ) | [inline, virtual] |
Implements RobotArm.
Definition at line 42 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::refJoint | ( | IDType | id | ) | [inline, virtual] |
Implements RobotArm.
Reimplemented in LWA3ArmUASHH.
Definition at line 50 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::setAcceleration | ( | IDType | id, |
| float | acceleration | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 68 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::setCurrent | ( | IDType | id, |
| float | current | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 71 of file AmtecProtocolArm.h.
| virtual int AmtecProtocolArm::setVelocity | ( | IDType | id, |
| float | velocity | ||
| ) | [inline, virtual] |
Implements RobotArm.
Definition at line 65 of file AmtecProtocolArm.h.
Member Data Documentation
AmtecManipulator AmtecProtocolArm::manipulator_ [protected] |
Definition at line 111 of file AmtecProtocolArm.h.
The documentation for this class was generated from the following file: