#include <MetraLabsBase.h>#include <base/Errors.h>#include <hardware/SCHUNKMotionManipulator.h>#include "RobotArm.h"
Include dependency graph for SchunkProtocolArm.h:

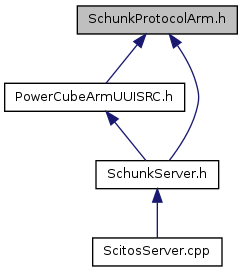
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | SchunkProtocolArm |
Defines | |
| #define | DEG_TO_RAD(d) ((d)*M_PI/180.0) |
| #define | RAD_TO_DEG(r) ((r)*180.0/M_PI) |
Define Documentation
| #define DEG_TO_RAD | ( | d | ) | ((d)*M_PI/180.0) |
Definition at line 20 of file SchunkProtocolArm.h.
| #define RAD_TO_DEG | ( | r | ) | ((r)*180.0/M_PI) |
Definition at line 21 of file SchunkProtocolArm.h.