Base class for plugins to Publisher. More...
#include <publisher_plugin.h>
Public Member Functions | |
| virtual void | advertise (ros::NodeHandle &nh, const std::string &base_topic, uint32_t queue_size, bool latch=true) |
| Advertise a topic, simple version. | |
| void | advertise (ros::NodeHandle &nh, const std::string &base_topic, uint32_t queue_size, const typename message_transport::SingleSubscriberPublisher< M >::StatusCB &connect_cb, const typename message_transport::SingleSubscriberPublisher< M >::StatusCB &disconnect_cb=SingleSubscriberPublisher< M >::StatusCB(), const ros::VoidPtr &tracked_object=ros::VoidPtr(), bool latch=true) |
| Advertise a topic with subscriber status callbacks. | |
| virtual void | publish (const M &message) const =0 |
| Publish an image using the transport associated with this PublisherPlugin. | |
| virtual void | publish (const typename M::ConstPtr &message) const |
| Publish an image using the transport associated with this PublisherPlugin. | |
| virtual | ~PublisherPlugin () |
Protected Member Functions | |
| virtual void | advertiseImpl (ros::NodeHandle &nh, const std::string &base_topic, uint32_t queue_size, const typename message_transport::SingleSubscriberPublisher< M >::StatusCB &connect_cb, const typename message_transport::SingleSubscriberPublisher< M >::StatusCB &disconnect_cb, const ros::VoidPtr &tracked_object, bool latch)=0 |
| Advertise a topic. Must be implemented by the subclass. | |
Detailed Description
template<class M>
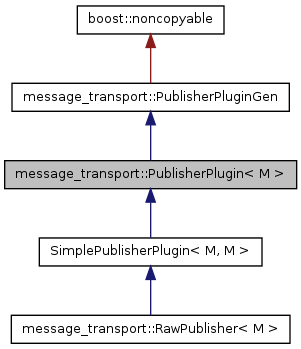
class message_transport::PublisherPlugin< M >
Base class for plugins to Publisher.
Definition at line 61 of file publisher_plugin.h.
Constructor & Destructor Documentation
| virtual message_transport::PublisherPlugin< M >::~PublisherPlugin | ( | ) | [inline, virtual] |
Definition at line 64 of file publisher_plugin.h.
Member Function Documentation
| virtual void message_transport::PublisherPlugin< M >::advertise | ( | ros::NodeHandle & | nh, |
| const std::string & | base_topic, | ||
| uint32_t | queue_size, | ||
| bool | latch = true |
||
| ) | [inline, virtual] |
Advertise a topic, simple version.
Implements message_transport::PublisherPluginGen.
Definition at line 66 of file publisher_plugin.h.
| void message_transport::PublisherPlugin< M >::advertise | ( | ros::NodeHandle & | nh, |
| const std::string & | base_topic, | ||
| uint32_t | queue_size, | ||
| const typename message_transport::SingleSubscriberPublisher< M >::StatusCB & | connect_cb, | ||
| const typename message_transport::SingleSubscriberPublisher< M >::StatusCB & | disconnect_cb = SingleSubscriberPublisher<M>::StatusCB(), |
||
| const ros::VoidPtr & | tracked_object = ros::VoidPtr(), |
||
| bool | latch = true |
||
| ) | [inline] |
Advertise a topic with subscriber status callbacks.
Definition at line 78 of file publisher_plugin.h.
| virtual void message_transport::PublisherPlugin< M >::advertiseImpl | ( | ros::NodeHandle & | nh, |
| const std::string & | base_topic, | ||
| uint32_t | queue_size, | ||
| const typename message_transport::SingleSubscriberPublisher< M >::StatusCB & | connect_cb, | ||
| const typename message_transport::SingleSubscriberPublisher< M >::StatusCB & | disconnect_cb, | ||
| const ros::VoidPtr & | tracked_object, | ||
| bool | latch | ||
| ) | [protected, pure virtual] |
Advertise a topic. Must be implemented by the subclass.
Implemented in message_transport::SimplePublisherPlugin< Base, M >, and message_transport::SimplePublisherPlugin< M, M >.
| virtual void message_transport::PublisherPlugin< M >::publish | ( | const M & | message | ) | const [pure virtual] |
Publish an image using the transport associated with this PublisherPlugin.
Implemented in message_transport::SimplePublisherPlugin< Base, M >, and message_transport::SimplePublisherPlugin< M, M >.
| virtual void message_transport::PublisherPlugin< M >::publish | ( | const typename M::ConstPtr & | message | ) | const [inline, virtual] |
Publish an image using the transport associated with this PublisherPlugin.
Definition at line 95 of file publisher_plugin.h.
The documentation for this class was generated from the following file: