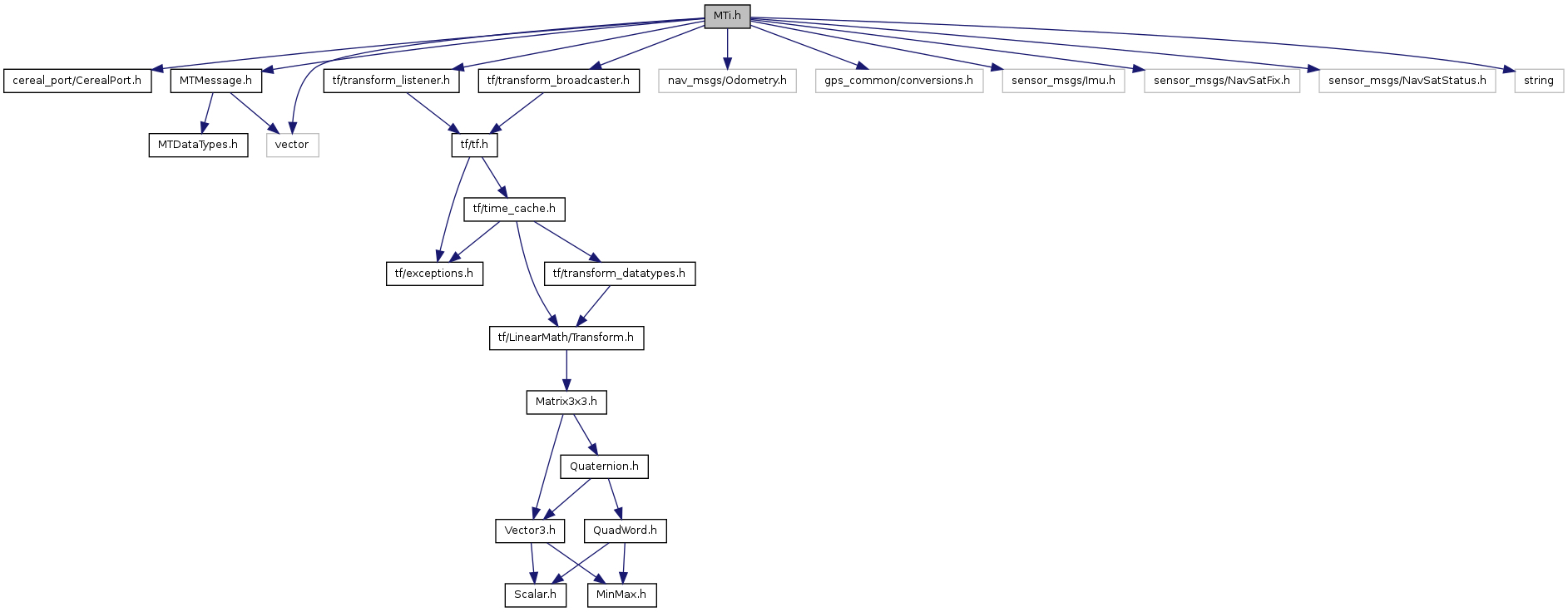
#include <cereal_port/CerealPort.h>
#include "MTMessage.h"
#include <tf/transform_broadcaster.h>
#include <tf/transform_listener.h>
#include <nav_msgs/Odometry.h>
#include <gps_common/conversions.h>
#include <sensor_msgs/Imu.h>
#include <sensor_msgs/NavSatFix.h>
#include <sensor_msgs/NavSatStatus.h>
#include <string>
#include <vector>
Go to the source code of this file.
Classes |
| struct | Xsens::MTi::_outputMode |
| struct | Xsens::MTi::_outputSettings |
| struct | Xsens::MTi::_Position |
| class | Xsens::MTi |
Namespaces |
| namespace | Xsens |
Defines |
| #define | BID 0xFF |
| #define | PRE 0xFA |
Typedefs |
| typedef enum Xsens::_Scenario | Xsens::Scenario |
Enumerations |
| enum | Xsens::_Scenario {
Xsens::General = 1,
Xsens::Automotive = 2,
Xsens::Aerospace = 3,
Xsens::Human = 4,
Xsens::Human_large_accelerations = 5,
Xsens::Machine = 6,
Xsens::Machine_nomagfield = 7,
Xsens::Marine_MTIMTX = 8,
Xsens::General_nobaro = 9,
Xsens::Aerospace_nobaro = 10,
Xsens::Automotive_nobaro = 11,
Xsens::Marine_MTIG = 17
} |
Variables |
| static const std::string | Xsens::BASE_LINK_FRAME_ID = "/base_link" |
| static const unsigned char | Xsens::GPS_FIX = 0x04 |
| static const int | Xsens::GPS_PVT_DATA_OFFSET = 44 |
| static const std::string | Xsens::IMU_FRAME_ID = "/base_imu" |
| static const std::string | Xsens::ODOMETRY_FRAME_ID = "/odom" |
| static const int | Xsens::ONE_BYTE = 1 |
| static const unsigned char | Xsens::SELF_TEST = 0x01 |
| static const unsigned char | Xsens::XKF_VALID = 0x02 |
Define Documentation
Definition at line 56 of file MTi.h.
Definition at line 55 of file MTi.h.