jsk_pcl_ros ROS Launch Files¶
Description: jsk_pcl_ros
jsk_pcl_ros
License: BSD
color_converter_sample.launch¶
roslaunch jsk_pcl_ros color_converter_sample.launch
color_filter_sample.launch¶
roslaunch jsk_pcl_ros color_filter_sample.launch
pointcloud_screenpoint_sample.launch¶
roslaunch jsk_pcl_ros pointcloud_screenpoint_sample.launch
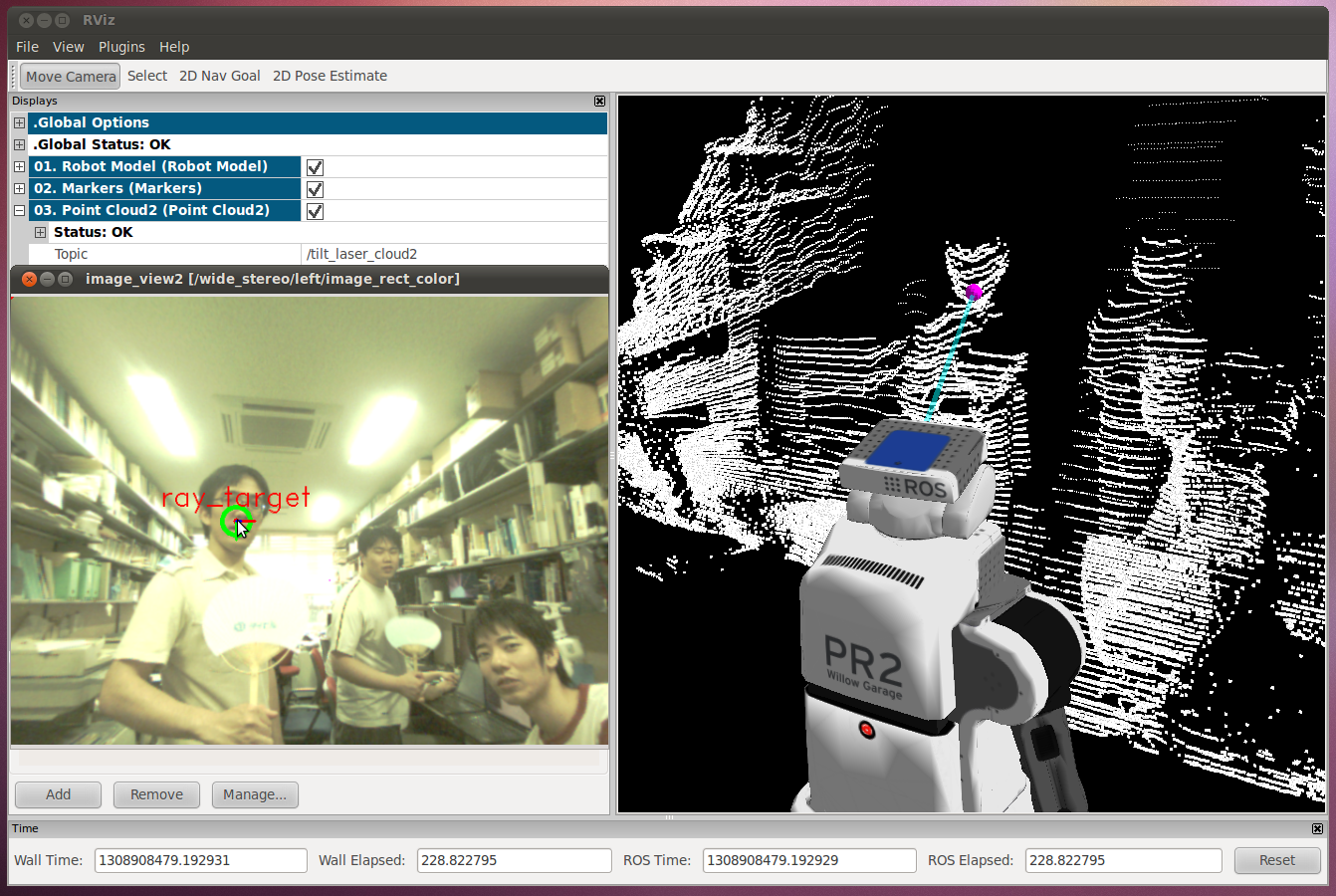
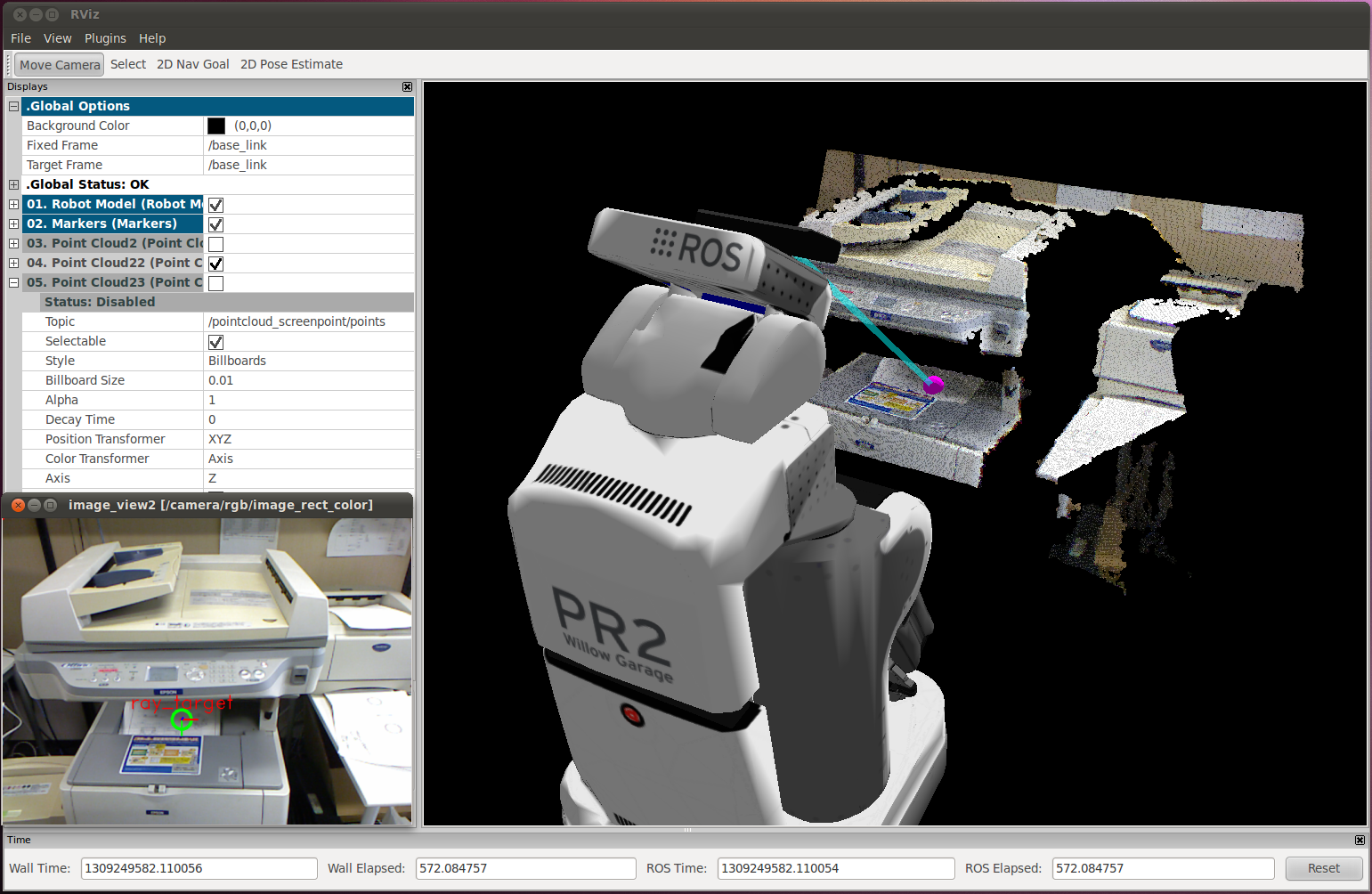
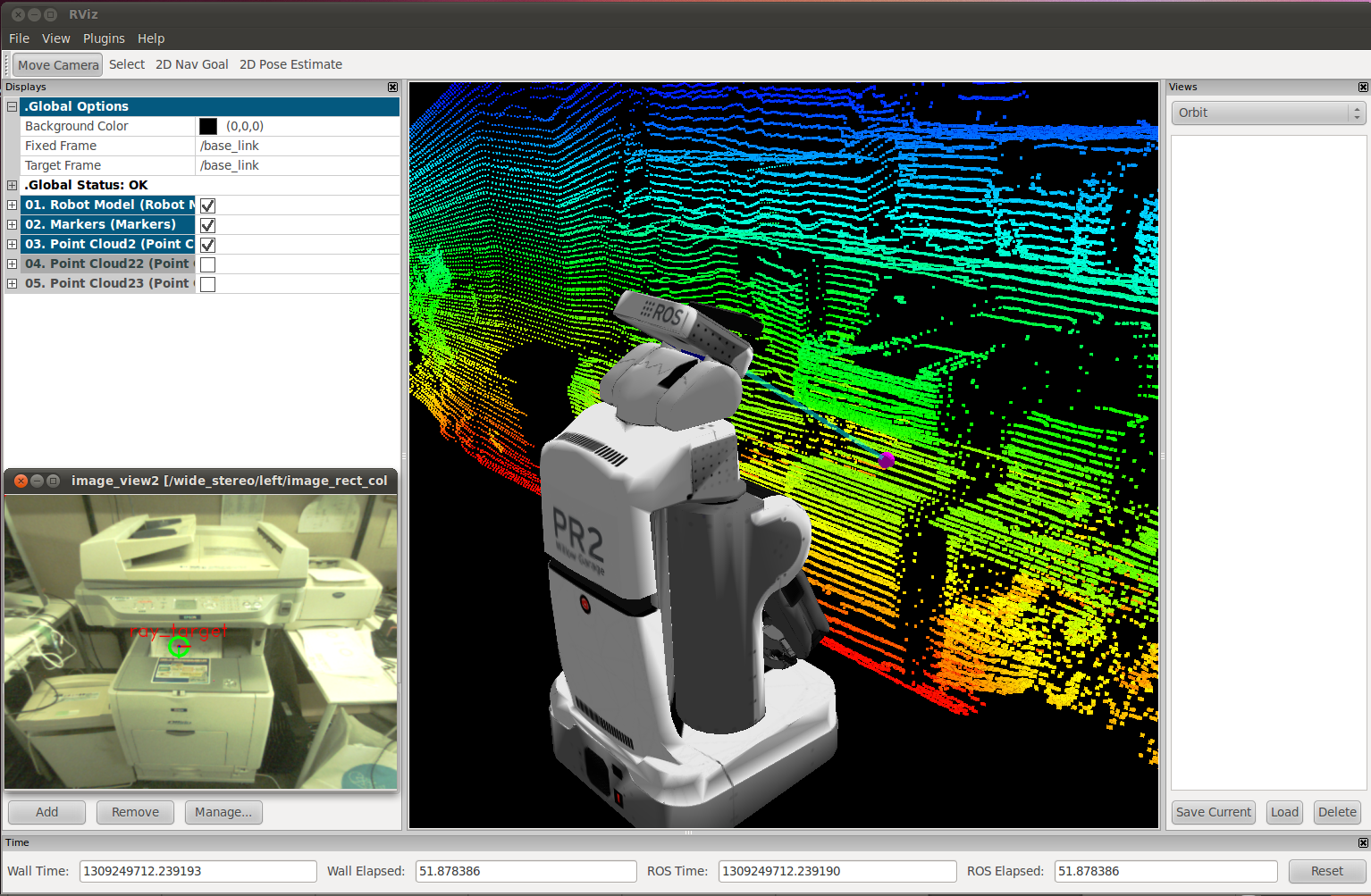
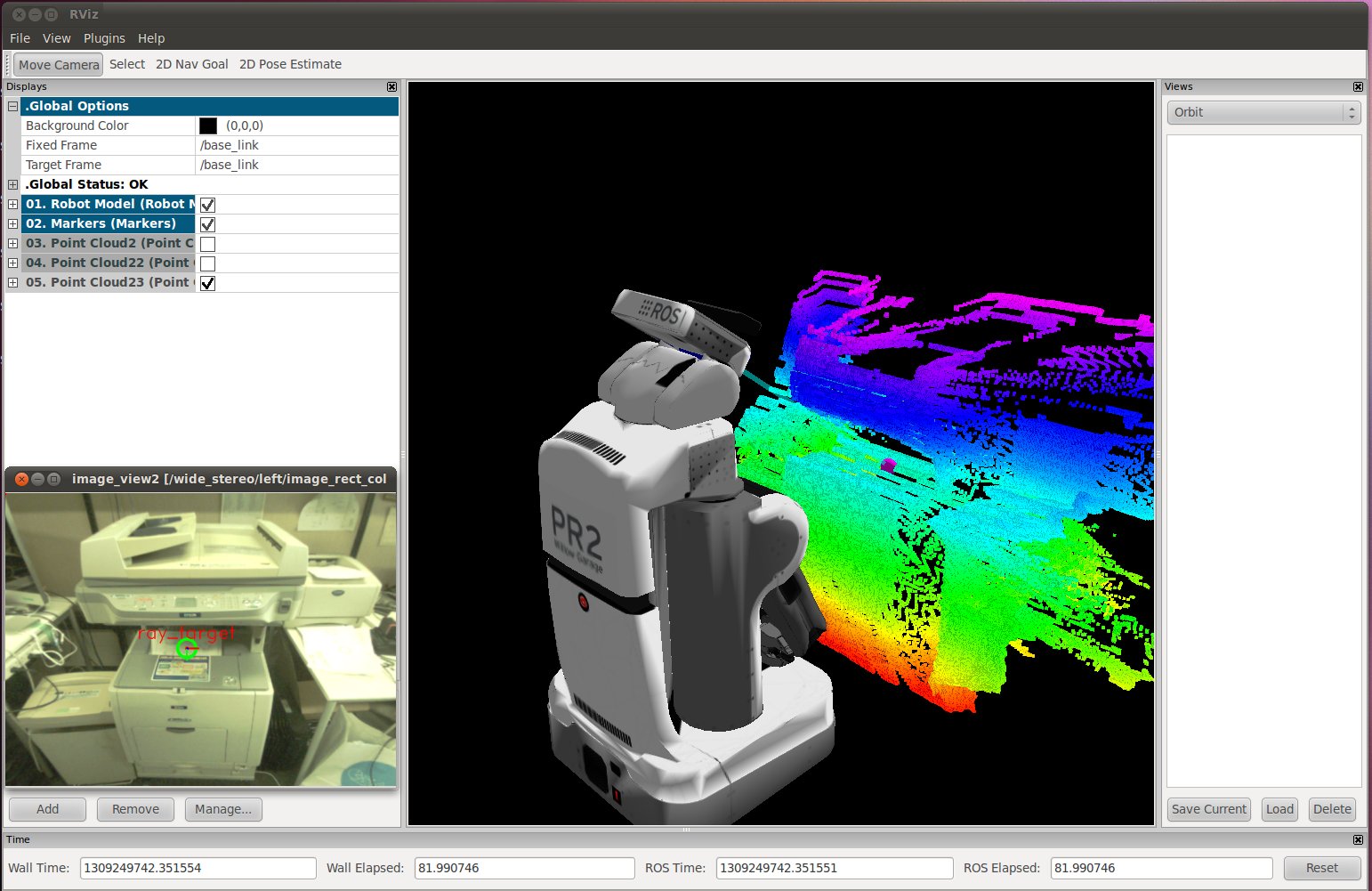
This script displays which point the user pointed on a 2D screen in the 3D rviz.
Sample images below:
There are two parameters to input.
- ‘image’ is used in showing a image view on the image_view2, and its camera_info parameter is used for changing the coordinates of points.
- ‘points’ is the pointcloud source to estimate 3D points that the user wantedt to specify on a 2D screen.
For example, By default, pointcloud_screenpoint takes camera image and point clouds from kinect.
roslaunch jsk_pcl_ros pointcloud_screenpoint_sample.launch
You can mix wide_stereo camera and assembled_tilt_scan.
roslaunch jsk_pcl_ros pointcloud_screenpoint_sample.launch image:=/wide_stereo/left points:=/tilt_laser_cloud2
Or, you can mix kinect camera and assembled_tilt_scan.
roslaunch jsk_pcl_ros pointcloud_screenpoint_sample.launch image:=/camera/rgb points:=/tilt_laser_cloud2
pointclouds published by kinect
pointclouds published by laser
amplifiered pointclouds published by laser
Contents¶
<launch>
<machine address="pr1012" name="c1" ros-package-path="$(env ROS_PACKAGE_PATH)" ros-root="$(env ROS_ROOT)">
<env name="PATH" value="$(env PATH)" />
</machine>
<arg default="c1" name="cloud_machine" />
<arg default="localhost" name="display_machine" />
<arg default="/camera/rgb" name="image" />
<arg default="/camera/rgb/points" name="points" />
<include file="$(find jsk_pcl_ros)/launch/pointcloud_screenpoint.launch">
<arg default="$(arg cloud_machine)" name="cloud_machine" />
<arg default="$(arg display_machine)" name="display_machine" />
<arg default="$(arg image)" name="image" />
<arg default="$(arg points)" name="points" />
</include>
<node machine="localhost" name="display_point" output="screen" pkg="jsk_pcl_ros" type="pointcloud_screenpoint.l">
<param name="~sensor_topic" value="$(arg image)/image_rect_color" />
<param name="~ray_srv" value="/pointcloud_screenpoint_nodelet/screen_to_point" />
</node>
<node machine="$(arg display_machine)" name="image_view2" pkg="image_view2" type="image_view2">
<remap from="image" to="$(arg image)/image_rect_color" />
<remap from="camera_info" to="$(arg image)/camera_info" />
</node>
</launch>
background_subtraction.launch¶
roslaunch jsk_pcl_ros background_subtraction.launch
hsv_color_filter.launch¶
roslaunch jsk_pcl_ros hsv_color_filter.launch
pointcloud_screenpoint.launch¶
roslaunch jsk_pcl_ros pointcloud_screenpoint.launch
Please see pointcloud_screenpoint_sample.launch for documentation.
Contents¶
<launch>
<machine address="localhost" env-loader="$(env ROS_ENV_LOADER)" name="localhost" />
<arg default="localhost" name="cloud_machine" />
<arg default="/openni/rgb" name="image" />
<arg default="$(arg image)/camera_info" name="camera_info" />
<arg default="/openni/depth_registered/points" name="points" />
<node args="manager" machine="$(arg cloud_machine)" name="pointcloud_screenpoint" output="screen" pkg="nodelet" respawn="true" type="nodelet" />
<node args="load jsk_pcl/DepthImageCreator pointcloud_screenpoint" clear_params="true" machine="$(arg cloud_machine)" name="depth_image_creator_nodelet" output="screen" pkg="nodelet" respawn="true" type="nodelet">
<remap from="~info" to="$(arg camera_info)" />
<remap from="~input" to="$(arg points)" />
<remap from="~output_cloud" to="/pointcloud_screenpoint/points" />
<rosparam>
scale_depth: 5.0
max_queue_size: 10
use_fixed_transform: false
use_service: false
use_asynchronous: false
use_approximate: true
</rosparam>
</node>
<node args="load jsk_pcl/PointcloudScreenpoint pointcloud_screenpoint" machine="$(arg cloud_machine)" name="pointcloud_screenpoint_nodelet" output="screen" pkg="nodelet" respawn="true" type="nodelet">
<remap from="~points" to="/pointcloud_screenpoint/points" />
</node>
</launch>