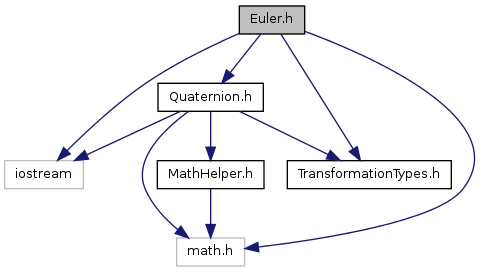
Include dependency graph for Euler.h:
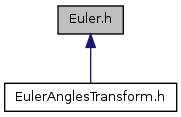
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rotateOp::Euler |
| This class defines a euler angle. the euler angles are three angles to describe the orientation of a rigid body. Euler angles represent three composed rotations that move a reference frame to a given referred frame. Any orientation can be achieved by composing three elemental rotations (rotations around a single axis). The order to rotate the three angles over this axis is important to determine the final position of the body with its reference frame. The Euler angles will be roll, pitch and yaw. More... | |
Namespaces | |
| namespace | rotateOp |