|
Description:
Functionalities:
More information: |
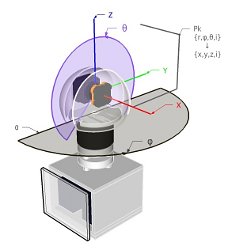
iri_hokuyo_laser3d: iri_hokuyo_laser3d
This is a wrapper for the driver of the 3D Laser scanner H3D of IRI.
- Homepage: http://ros.org/wiki/iri_hokuyo_laser3d
howto
Run node
Call this node from rosrun:
rosrun iri_hokuyo_laser3d iri_hokuyo_laser3d frame_id:=/robot/laser3d
Call this node from launch:
<launch> <node pkg="iri_hokuyo_laser3d" type="iri_hokuyo_laser3d" name="h3d" output="screen"> <param name="frame_id" value="/robot/laser3d"/> <param name="laser_port" value="/dev/ttyACM0" /> <param name="scan_mode" value="True" /> <!-- from home position:True, from current position:False --> <param name="resolution" value="0.5" /> <!-- [0.05, 2] --> <param name="laser_mode" value="1" /> <!-- range:0, range+intensity:1 --> <param name="continuous" value="False" /> <param name="publish_pointcloud" value="False" /> <param name="publish_pointcloud2" value="True" /> </node> </launch>
Call service
Call the service from command line:
Call the service from code in manifest file:
<depend package="iri_hokuyo_laser3d" />
in cpp code:
#include <iri_hokuyo_laser3d/Get3DScan.h> iri_hokuyo_laser3d::Get3DScan get_pointcloud; get_pointcloud.request.request = 1; if(ros::service::exists("/robot/laser3d/get_3d_scan",true)) { if(ros::service::call("/robot/laser3d/get_3d_scan", get_pointcloud)) ROS_DEBUG("get_3d_scan Service Called"); else ROS_WARN("get_3d_scan Service NOT Called"); }else{ ROS_WARN("get_3d_scan service doesn't exist!"); }