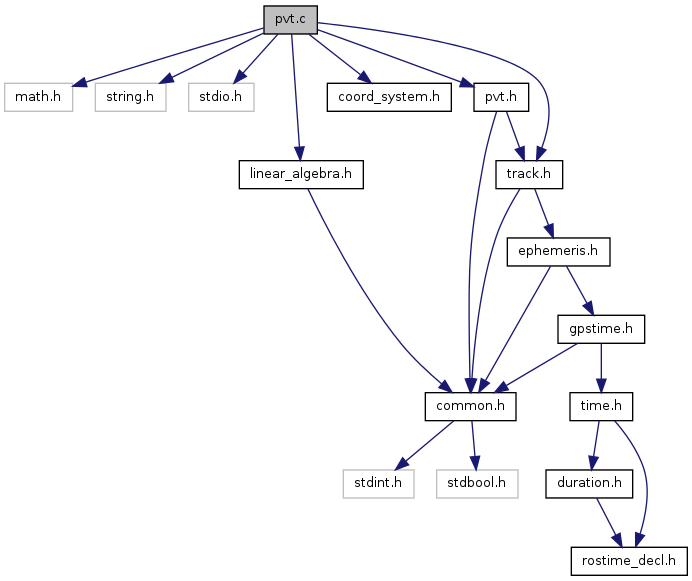
#include <math.h>
#include <string.h>
#include <stdio.h>
#include "linear_algebra.h"
#include "coord_system.h"
#include "pvt.h"
#include "track.h"
Go to the source code of this file.
Functions |
| u8 | calc_PVT (const u8 n_used, const navigation_measurement_t const nav_meas[n_used], gnss_solution *soln, dops_t *dops) |
| void | compute_dops (const double const H[4][4], const double const pos_ecef[3], dops_t *dops) |
| u8 | filter_solution (gnss_solution *soln, dops_t *dops) |
| static double | pvt_solve (double rx_state[], const u8 n_used, const navigation_measurement_t const nav_meas[n_used], double H[4][4]) |
| static double | vel_solve (double rx_vel[], const navigation_measurement_t const nav_meas[GPS_NUM_SATS], const u8 n_used, const double const G[n_used][4], const double const X[4][n_used]) |
Function Documentation
| void compute_dops |
( |
const double const |
H[4][4], |
|
|
const double const |
pos_ecef[3], |
|
|
dops_t * |
dops |
|
) |
| |
Definition at line 62 of file pvt.c.
| static double vel_solve |
( |
double |
rx_vel[], |
|
|
const navigation_measurement_t const |
nav_meas[GPS_NUM_SATS], |
|
|
const u8 |
n_used, |
|
|
const double const |
G[n_used][4], |
|
|
const double const |
X[4][n_used] |
|
) |
| [static] |
Definition at line 24 of file pvt.c.