#include <fixed_front_cart_planner.h>
Public Member Functions | |
| FixedFrontCartPlanner () | |
| virtual | ~FixedFrontCartPlanner () |
Protected Types | |
| enum | CONTROL_MODE { REGULAR, ROTATING_IN_PLACE, RECOVERY } |
| enum | FILTER_OPTIONS { GLOBAL_SCALING = 0x1, CART_ERR_SCALING = GLOBAL_SCALING << 1, COMPENSATE_BASE_TWIST = GLOBAL_SCALING << 2, HOLONOMIC_CONSTRAINT = GLOBAL_SCALING << 3, ALL = 0xffff } |
Protected Member Functions | |
| virtual void | controlModeAction () |
| virtual void | filterTwistsCombined (int filter_options) |
| virtual void | initialization_extras () |
| A place to implement any additional initialization required for the planner. Gets called at the end of initialize() | |
| double | pointCartAtTarget (tf::Pose &point_pose) |
| virtual void | setControlMode () |
| Sets the internal control mode for the computeVelocityCommands switch. | |
Protected Attributes | |
| double | cart_max_y_offset_ |
| Maximum distance in y direction allowed for cart before we're in recovery mode. | |
| enum CONTROL_MODE | control_mode_ |
| CostmapTrajectoryChecker | extra_cart_collision_checker_ |
| double | y_compensation_gain_ |
| scalar to multiply y-error for adujusting yaw | |
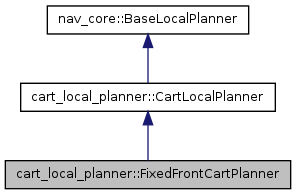
Detailed Description
Definition at line 92 of file fixed_front_cart_planner.h.
Member Enumeration Documentation
enum cart_local_planner::FixedFrontCartPlanner::CONTROL_MODE [protected] |
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 136 of file fixed_front_cart_planner.h.
enum cart_local_planner::FixedFrontCartPlanner::FILTER_OPTIONS [protected] |
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 141 of file fixed_front_cart_planner.h.
Constructor & Destructor Documentation
Definition at line 14 of file fixed_front_cart_planner.cpp.
Definition at line 18 of file fixed_front_cart_planner.cpp.
Member Function Documentation
| void cart_local_planner::FixedFrontCartPlanner::controlModeAction | ( | ) | [protected, virtual] |
Implements what to do during computeVelocityCommands for each control mode. This provides a greater degree of control than the default supported by the base_local_planner API, for problems such as rotating in place or evading collisions that the global planner doesn't know about (e.g. cart collisions).
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 44 of file fixed_front_cart_planner.cpp.
| void cart_local_planner::FixedFrontCartPlanner::filterTwistsCombined | ( | int | filter_options | ) | [protected, virtual] |
Applies requested operations on the provided twists
- Parameters:
-
filter_options An int containing OR'ed together FILTER_OPTIONS
Scale everything by its max;
Map base twist to cart and subtract it from cart twist (makes cart track better as base rounds corners)
Eliminate linear.y component of cart twist, and make up for it with angular.z
Scale base vel based on cart error (turns out to be a very handy trick for keeping the cart on track - this is basically a gaussian)
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 81 of file fixed_front_cart_planner.cpp.
| void cart_local_planner::FixedFrontCartPlanner::initialization_extras | ( | ) | [protected, virtual] |
A place to implement any additional initialization required for the planner. Gets called at the end of initialize()
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 22 of file fixed_front_cart_planner.cpp.
| double cart_local_planner::FixedFrontCartPlanner::pointCartAtTarget | ( | tf::Pose & | point_pose | ) | [protected] |
Compute the pose required to point
- Parameters:
-
point_pose
- Returns:
| void cart_local_planner::FixedFrontCartPlanner::setControlMode | ( | ) | [protected, virtual] |
Sets the internal control mode for the computeVelocityCommands switch.
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 30 of file fixed_front_cart_planner.cpp.
Member Data Documentation
double cart_local_planner::FixedFrontCartPlanner::cart_max_y_offset_ [protected] |
Maximum distance in y direction allowed for cart before we're in recovery mode.
Definition at line 149 of file fixed_front_cart_planner.h.
enum CONTROL_MODE cart_local_planner::FixedFrontCartPlanner::control_mode_ [protected] |
Reimplemented from cart_local_planner::CartLocalPlanner.
Definition at line 139 of file fixed_front_cart_planner.h.
CostmapTrajectoryChecker cart_local_planner::FixedFrontCartPlanner::extra_cart_collision_checker_ [protected] |
Definition at line 152 of file fixed_front_cart_planner.h.
double cart_local_planner::FixedFrontCartPlanner::y_compensation_gain_ [protected] |
scalar to multiply y-error for adujusting yaw
Definition at line 150 of file fixed_front_cart_planner.h.
The documentation for this class was generated from the following files: