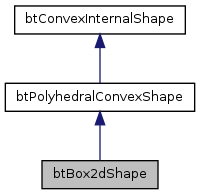
The btBox2dShape is a box primitive around the origin, its sides axis aligned with length specified by half extents, in local shape coordinates. When used as part of a btCollisionObject or btRigidBody it will be an oriented box in world space. More...
#include <btBox2dShape.h>
Public Member Functions | |
| virtual void | batchedUnitVectorGetSupportingVertexWithoutMargin (const btVector3 *vectors, btVector3 *supportVerticesOut, int numVectors) const |
| btBox2dShape (const btVector3 &boxHalfExtents) | |
| a btBox2dShape is a flat 2D box in the X-Y plane (Z extents are zero) | |
| virtual void | calculateLocalInertia (btScalar mass, btVector3 &inertia) const |
| virtual void | getAabb (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version | |
| const btVector3 & | getCentroid () const |
| virtual void | getEdge (int i, btVector3 &pa, btVector3 &pb) const |
| btVector3 | getHalfExtentsWithMargin () const |
| const btVector3 & | getHalfExtentsWithoutMargin () const |
| virtual const char * | getName () const |
| const btVector3 * | getNormals () const |
| virtual int | getNumEdges () const |
| virtual int | getNumPlanes () const |
| virtual int | getNumPreferredPenetrationDirections () const |
| virtual int | getNumVertices () const |
| virtual void | getPlane (btVector3 &planeNormal, btVector3 &planeSupport, int i) const |
| virtual void | getPlaneEquation (btVector4 &plane, int i) const |
| virtual void | getPreferredPenetrationDirection (int index, btVector3 &penetrationVector) const |
| virtual void | getVertex (int i, btVector3 &vtx) const |
| int | getVertexCount () const |
| const btVector3 * | getVertices () const |
| virtual bool | isInside (const btVector3 &pt, btScalar tolerance) const |
| virtual btVector3 | localGetSupportingVertex (const btVector3 &vec) const |
| SIMD_FORCE_INLINE btVector3 | localGetSupportingVertexWithoutMargin (const btVector3 &vec) const |
| virtual void | setLocalScaling (const btVector3 &scaling) |
| virtual void | setMargin (btScalar collisionMargin) |
Private Attributes | |
| btVector3 | m_centroid |
| btVector3 | m_normals [4] |
| btVector3 | m_vertices [4] |
The btBox2dShape is a box primitive around the origin, its sides axis aligned with length specified by half extents, in local shape coordinates. When used as part of a btCollisionObject or btRigidBody it will be an oriented box in world space.
Definition at line 26 of file btBox2dShape.h.
| btBox2dShape::btBox2dShape | ( | const btVector3 & | boxHalfExtents | ) | [inline] |
a btBox2dShape is a flat 2D box in the X-Y plane (Z extents are zero)
Definition at line 87 of file btBox2dShape.h.
| virtual void btBox2dShape::batchedUnitVectorGetSupportingVertexWithoutMargin | ( | const btVector3 * | vectors, |
| btVector3 * | supportVerticesOut, | ||
| int | numVectors | ||
| ) | const [inline, virtual] |
Reimplemented from btPolyhedralConvexShape.
Definition at line 71 of file btBox2dShape.h.
| virtual void btBox2dShape::calculateLocalInertia | ( | btScalar | mass, |
| btVector3 & | inertia | ||
| ) | const [virtual] |
Reimplemented from btPolyhedralConvexShape.
| virtual void btBox2dShape::getAabb | ( | const btTransform & | t, |
| btVector3 & | aabbMin, | ||
| btVector3 & | aabbMax | ||
| ) | const [virtual] |
getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version
Reimplemented from btConvexInternalShape.
| const btVector3& btBox2dShape::getCentroid | ( | ) | const [inline] |
Definition at line 180 of file btBox2dShape.h.
| virtual void btBox2dShape::getEdge | ( | int | i, |
| btVector3 & | pa, | ||
| btVector3 & | pb | ||
| ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 239 of file btBox2dShape.h.
| btVector3 btBox2dShape::getHalfExtentsWithMargin | ( | ) | const [inline] |
Definition at line 37 of file btBox2dShape.h.
| const btVector3& btBox2dShape::getHalfExtentsWithoutMargin | ( | ) | const [inline] |
Definition at line 45 of file btBox2dShape.h.
| virtual const char* btBox2dShape::getName | ( | ) | const [inline, virtual] |
Definition at line 328 of file btBox2dShape.h.
| const btVector3* btBox2dShape::getNormals | ( | ) | const [inline] |
Definition at line 159 of file btBox2dShape.h.
| virtual int btBox2dShape::getNumEdges | ( | ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 192 of file btBox2dShape.h.
| virtual int btBox2dShape::getNumPlanes | ( | ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 185 of file btBox2dShape.h.
| virtual int btBox2dShape::getNumPreferredPenetrationDirections | ( | ) | const [inline, virtual] |
Reimplemented from btConvexInternalShape.
Definition at line 333 of file btBox2dShape.h.
| virtual int btBox2dShape::getNumVertices | ( | ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 149 of file btBox2dShape.h.
| virtual void btBox2dShape::getPlane | ( | btVector3 & | planeNormal, |
| btVector3 & | planeSupport, | ||
| int | i | ||
| ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 170 of file btBox2dShape.h.
| virtual void btBox2dShape::getPlaneEquation | ( | btVector4 & | plane, |
| int | i | ||
| ) | const [inline, virtual] |
Definition at line 209 of file btBox2dShape.h.
| virtual void btBox2dShape::getPreferredPenetrationDirection | ( | int | index, |
| btVector3 & | penetrationVector | ||
| ) | const [inline, virtual] |
Reimplemented from btConvexInternalShape.
Definition at line 338 of file btBox2dShape.h.
| virtual void btBox2dShape::getVertex | ( | int | i, |
| btVector3 & | vtx | ||
| ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 198 of file btBox2dShape.h.
| int btBox2dShape::getVertexCount | ( | ) | const [inline] |
Definition at line 144 of file btBox2dShape.h.
| const btVector3* btBox2dShape::getVertices | ( | ) | const [inline] |
Definition at line 154 of file btBox2dShape.h.
| virtual bool btBox2dShape::isInside | ( | const btVector3 & | pt, |
| btScalar | tolerance | ||
| ) | const [inline, virtual] |
Implements btPolyhedralConvexShape.
Definition at line 310 of file btBox2dShape.h.
| virtual btVector3 btBox2dShape::localGetSupportingVertex | ( | const btVector3 & | vec | ) | const [inline, virtual] |
Reimplemented from btConvexInternalShape.
Definition at line 51 of file btBox2dShape.h.
| SIMD_FORCE_INLINE btVector3 btBox2dShape::localGetSupportingVertexWithoutMargin | ( | const btVector3 & | vec | ) | const [inline, virtual] |
Reimplemented from btPolyhedralConvexShape.
Definition at line 62 of file btBox2dShape.h.
| virtual void btBox2dShape::setLocalScaling | ( | const btVector3 & | scaling | ) | [inline, virtual] |
Reimplemented from btConvexInternalShape.
Definition at line 122 of file btBox2dShape.h.
| virtual void btBox2dShape::setMargin | ( | btScalar | collisionMargin | ) | [inline, virtual] |
Reimplemented from btConvexInternalShape.
Definition at line 111 of file btBox2dShape.h.
btVector3 btBox2dShape::m_centroid [private] |
Definition at line 31 of file btBox2dShape.h.
btVector3 btBox2dShape::m_normals[4] [private] |
Definition at line 33 of file btBox2dShape.h.
btVector3 btBox2dShape::m_vertices[4] [private] |
Definition at line 32 of file btBox2dShape.h.

