#include "btBoxCollision.h"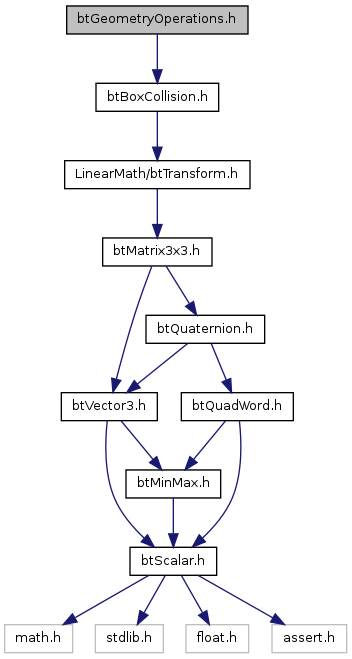
Go to the source code of this file.
Defines | |
| #define | BT_CLAMP(number, minval, maxval) (number<minval?minval:(number>maxval?maxval:number)) |
| #define | PARALELENORMALS 0.000001f |
| #define | PLANEDIREPSILON 0.0000001f |
Functions | |
| SIMD_FORCE_INLINE void | bt_closest_point_on_segment (btVector3 &cp, const btVector3 &v, const btVector3 &e1, const btVector3 &e2) |
| SIMD_FORCE_INLINE void | bt_edge_plane (const btVector3 &e1, const btVector3 &e2, const btVector3 &normal, btVector4 &plane) |
| Calc a plane from a triangle edge an a normal. plane is a vec4f. | |
| SIMD_FORCE_INLINE int | bt_line_plane_collision (const btVector4 &plane, const btVector3 &vDir, const btVector3 &vPoint, btVector3 &pout, btScalar &tparam, btScalar tmin, btScalar tmax) |
| line plane collision | |
| SIMD_FORCE_INLINE void | bt_segment_collision (const btVector3 &vA1, const btVector3 &vA2, const btVector3 &vB1, const btVector3 &vB2, btVector3 &vPointA, btVector3 &vPointB) |
| Find closest points on segments. | |
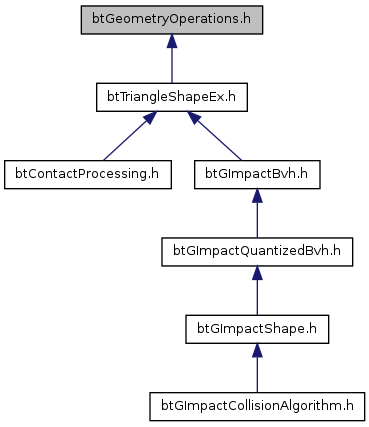
Definition in file btGeometryOperations.h.
| #define BT_CLAMP | ( | number, | |
| minval, | |||
| maxval | |||
| ) | (number<minval?minval:(number>maxval?maxval:number)) |
Definition at line 38 of file btGeometryOperations.h.
| #define PARALELENORMALS 0.000001f |
Definition at line 35 of file btGeometryOperations.h.
| #define PLANEDIREPSILON 0.0000001f |
Definition at line 34 of file btGeometryOperations.h.
| SIMD_FORCE_INLINE void bt_closest_point_on_segment | ( | btVector3 & | cp, |
| const btVector3 & | v, | ||
| const btVector3 & | e1, | ||
| const btVector3 & | e2 | ||
| ) |
Finds the closest point(cp) to (v) on a segment (e1,e2)
Definition at line 54 of file btGeometryOperations.h.
| SIMD_FORCE_INLINE void bt_edge_plane | ( | const btVector3 & | e1, |
| const btVector3 & | e2, | ||
| const btVector3 & | normal, | ||
| btVector4 & | plane | ||
| ) |
Calc a plane from a triangle edge an a normal. plane is a vec4f.
Definition at line 41 of file btGeometryOperations.h.
| SIMD_FORCE_INLINE int bt_line_plane_collision | ( | const btVector4 & | plane, |
| const btVector3 & | vDir, | ||
| const btVector3 & | vPoint, | ||
| btVector3 & | pout, | ||
| btScalar & | tparam, | ||
| btScalar | tmin, | ||
| btScalar | tmax | ||
| ) |
line plane collision
Definition at line 84 of file btGeometryOperations.h.
| SIMD_FORCE_INLINE void bt_segment_collision | ( | const btVector3 & | vA1, |
| const btVector3 & | vA2, | ||
| const btVector3 & | vB1, | ||
| const btVector3 & | vB2, | ||
| btVector3 & | vPointA, | ||
| btVector3 & | vPointB | ||
| ) |
Find closest points on segments.
Definition at line 121 of file btGeometryOperations.h.

