#include "BulletCollision/CollisionDispatch/btCollisionWorld.h"#include "BulletDynamics/ConstraintSolver/btContactSolverInfo.h"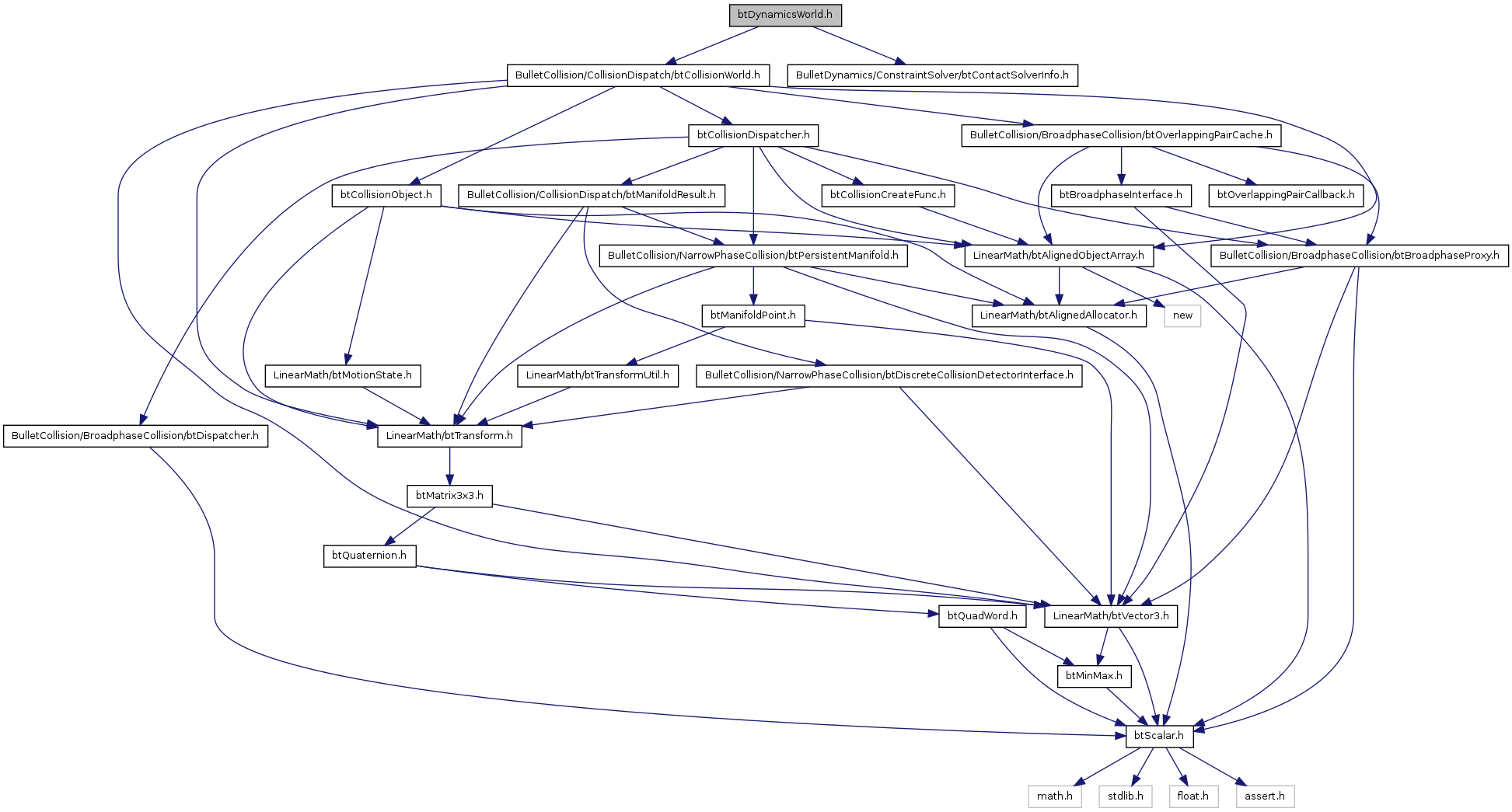
Go to the source code of this file.
Classes | |
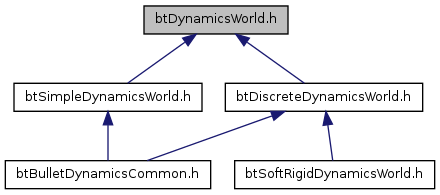
| class | btDynamicsWorld |
| The btDynamicsWorld is the interface class for several dynamics implementation, basic, discrete, parallel, and continuous etc. More... | |
Typedefs | |
| typedef void(* | btInternalTickCallback )(btDynamicsWorld *world, btScalar timeStep) |
| Type for the callback for each tick. | |
Enumerations | |
| enum | btDynamicsWorldType { BT_SIMPLE_DYNAMICS_WORLD = 1, BT_DISCRETE_DYNAMICS_WORLD = 2, BT_CONTINUOUS_DYNAMICS_WORLD = 3, BT_SOFT_RIGID_DYNAMICS_WORLD = 4 } |
| typedef void(* btInternalTickCallback)(btDynamicsWorld *world, btScalar timeStep) |
Type for the callback for each tick.
Definition at line 29 of file btDynamicsWorld.h.
| enum btDynamicsWorldType |
| BT_SIMPLE_DYNAMICS_WORLD | |
| BT_DISCRETE_DYNAMICS_WORLD | |
| BT_CONTINUOUS_DYNAMICS_WORLD | |
| BT_SOFT_RIGID_DYNAMICS_WORLD |
Definition at line 31 of file btDynamicsWorld.h.

