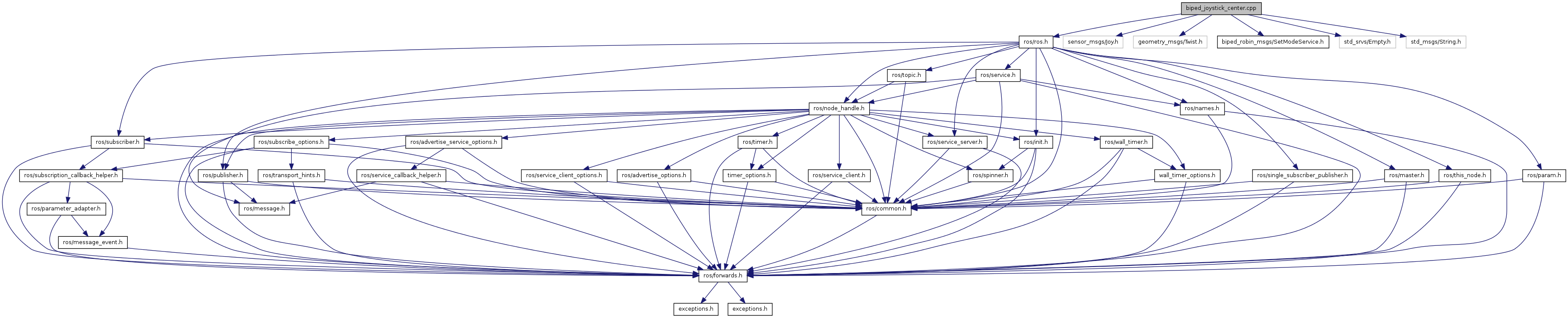
#include "ros/ros.h"#include "sensor_msgs/Joy.h"#include "geometry_msgs/Twist.h"#include "biped_robin_msgs/SetModeService.h"#include "std_srvs/Empty.h"#include "std_msgs/String.h"
Include dependency graph for biped_joystick_center.cpp:
Go to the source code of this file.
Functions | |
| void | joyCallback (const sensor_msgs::Joy::ConstPtr &joy_msg) |
| int | main (int argc, char **argv) |
Variables | |
| ros::ServiceClient | acknowledge_client |
| ros::ServiceClient | setMode_client |
| ros::Publisher | speech_pub |
| ros::ServiceClient | stop_client |
| ros::ServiceClient | walk_client |
Function Documentation
| void joyCallback | ( | const sensor_msgs::Joy::ConstPtr & | joy_msg | ) |
Definition at line 19 of file biped_joystick_center.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 72 of file biped_joystick_center.cpp.
Variable Documentation
Definition at line 13 of file biped_joystick_center.cpp.
Definition at line 14 of file biped_joystick_center.cpp.
Definition at line 17 of file biped_joystick_center.cpp.
Definition at line 15 of file biped_joystick_center.cpp.
Definition at line 16 of file biped_joystick_center.cpp.