#include "articulation_models/models/prismatic_model.h"#include "articulation_models/utils.h"#include "Eigen/Core"#include <Eigen/SVD>#include <iomanip>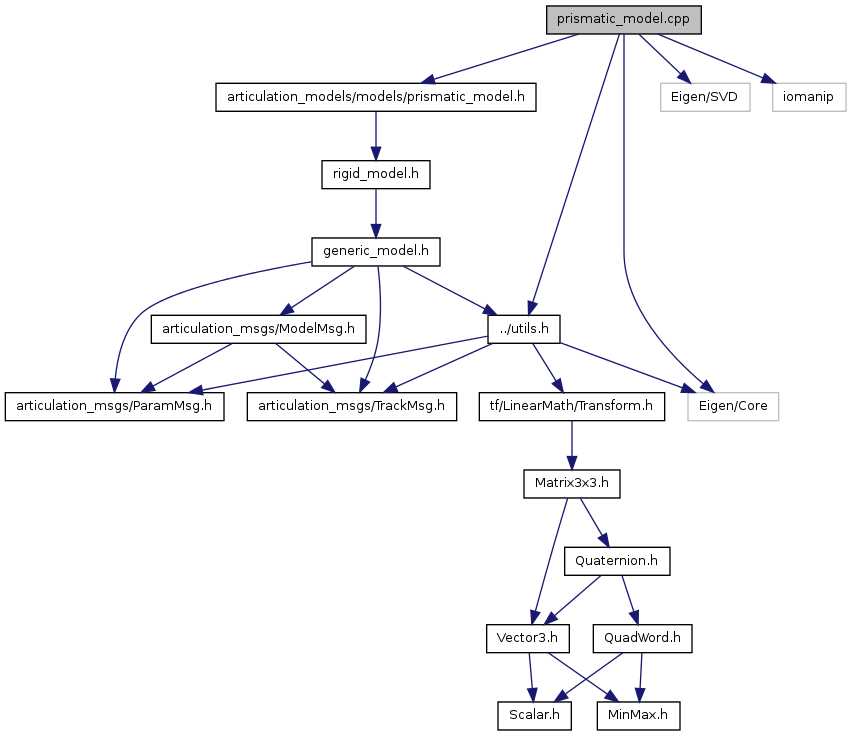
Go to the source code of this file.
Namespaces | |
| namespace | articulation_models |
Defines | |
| #define | PRINT(a) cout << #a <<"=" << VEC(a)<<endl; |
| #define | PRINT2(a) cout << #a <<"=" << VEC2(a)<<endl; |
| #define | VEC(a) setprecision(5)<<fixed<<a.x()<<" "<<a.y()<<" "<<a.z()<<" "<<a.w()<<" l="<<a.length() |
| #define | VEC2(a) "t=["<<VEC(a.getOrigin())<<"] r=[]"<<VEC(a.getRotation())<<"]" |
Definition at line 23 of file prismatic_model.cpp.
Definition at line 24 of file prismatic_model.cpp.
| #define VEC | ( | a | ) | setprecision(5)<<fixed<<a.x()<<" "<<a.y()<<" "<<a.z()<<" "<<a.w()<<" l="<<a.length() |
Definition at line 21 of file prismatic_model.cpp.
| #define VEC2 | ( | a | ) | "t=["<<VEC(a.getOrigin())<<"] r=[]"<<VEC(a.getRotation())<<"]" |
Definition at line 22 of file prismatic_model.cpp.

