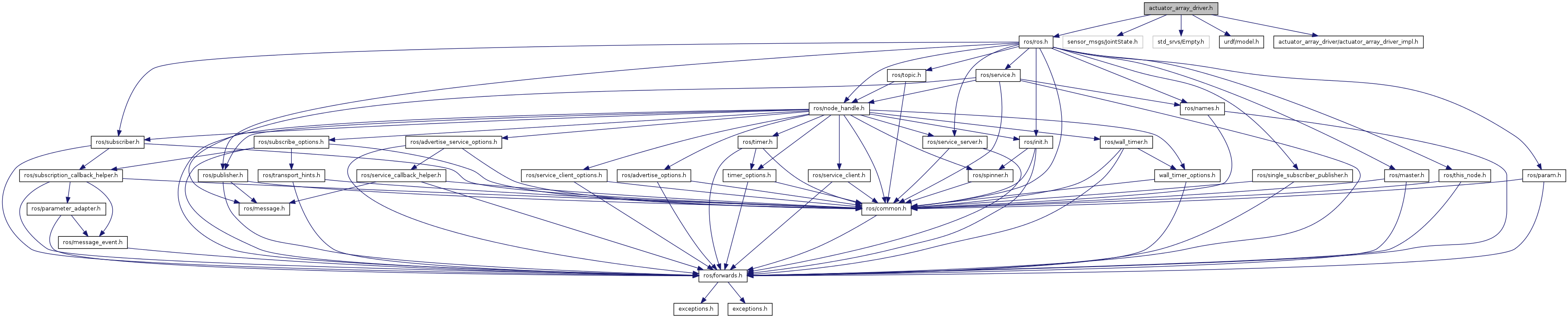
#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <std_srvs/Empty.h>#include <urdf/model.h>#include <actuator_array_driver/actuator_array_driver_impl.h>
Include dependency graph for actuator_array_driver.h:
Go to the source code of this file.
Classes | |
| class | actuator_array_driver::ActuatorArrayDriver< JOINT > |
| struct | actuator_array_driver::JointProperties |
Namespaces | |
| namespace | actuator_array_driver |