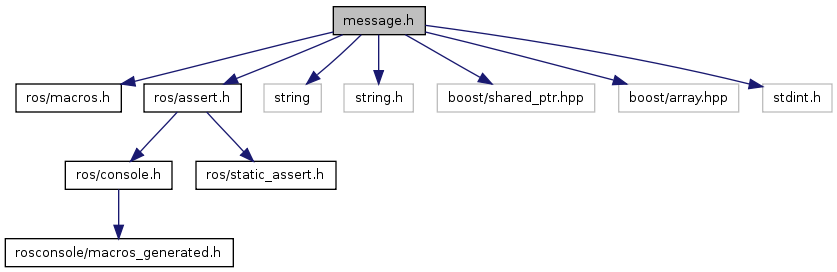
message.h File Reference
#include "ros/macros.h"
#include "ros/assert.h"
#include <string>
#include <string.h>
#include <boost/shared_ptr.hpp>
#include <boost/array.hpp>
#include <stdint.h>
Go to the source code of this file.
Namespaces |
| namespace | ros |
Defines |
| #define | ROSCPP_MESSAGE_HAS_DEFINITION |
| #define | SROS_DESERIALIZE_BUFFER(ptr, data, data_size) { if (data_size > 0) { memcpy(data, ptr, data_size); ptr += data_size; } } |
| #define | SROS_DESERIALIZE_PRIMITIVE(ptr, data) { memcpy(&data, ptr, sizeof(data)); ptr += sizeof(data); } |
| #define | SROS_SERIALIZE_BUFFER(ptr, data, data_size) { if (data_size > 0) { memcpy(ptr, data, data_size); ptr += data_size; } } |
| #define | SROS_SERIALIZE_PRIMITIVE(ptr, data) { memcpy(ptr, &data, sizeof(data)); ptr += sizeof(data); } |
Define Documentation
| #define ROSCPP_MESSAGE_HAS_DEFINITION |
| #define SROS_DESERIALIZE_BUFFER |
( |
ptr, |
|
|
data, |
|
|
data_size |
|
) |
{ if (data_size > 0) { memcpy(data, ptr, data_size); ptr += data_size; } } |
| #define SROS_DESERIALIZE_PRIMITIVE |
( |
ptr, |
|
|
data |
|
) |
{ memcpy(&data, ptr, sizeof(data)); ptr += sizeof(data); } |
| #define SROS_SERIALIZE_BUFFER |
( |
ptr, |
|
|
data, |
|
|
data_size |
|
) |
{ if (data_size > 0) { memcpy(ptr, data, data_size); ptr += data_size; } } |
| #define SROS_SERIALIZE_PRIMITIVE |
( |
ptr, |
|
|
data |
|
) |
{ memcpy(ptr, &data, sizeof(data)); ptr += sizeof(data); } |
- Deprecated:
- This base-class is deprecated in favor of a template-based serialization and traits system
Definition at line 82 of file message.h.
roscpp
Author(s): Morgan Quigley mquigley@cs.stanford.edu, Josh Faust jfaust@willowgarage.com, Brian Gerkey gerkey@willowgarage.com, Troy Straszheim straszheim@willowgarage.com
autogenerated on Sat Mar 2 13:23:06 2013