#include <vector>#include <map>#include <string>#include <algorithm>#include <cv.h>#include <highgui.h>#include <ml.h>#include "outlet_pose_estimation/detail/outlet_model.h"#include "outlet_pose_estimation/detail/learning.h"#include "outlet_pose_estimation/detail/planar.h"#include "outlet_pose_estimation/detail/outlet_tuple.h"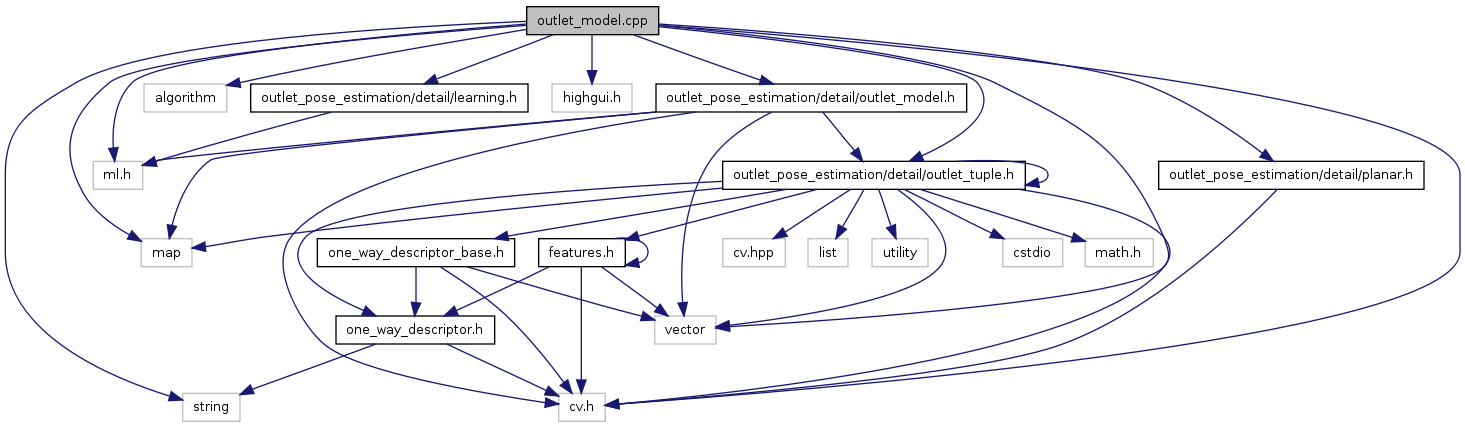
Go to the source code of this file.
Functions | |
| float | avgLine (IplImage *grey, cv::Point2f *line_ends) |
| void | calc_contrast_factor (IplImage *grey, CvRect rect, float &contrast, float &variation) |
| void | calc_labels (const vector< CvRect > &rects, const vector< outlet_feature_t > &keypts, vector< int > &labels) |
| int | calc_outlet_coords (vector< outlet_t > &outlets, CvMat *map_matrix, CvPoint3D32f origin, CvPoint2D32f scale, CvMat *rotation_vector, CvMat *translation_vector, CvMat *inv_map_matrix) |
| void | calc_outlet_coords (vector< outlet_t > &outlets, const outlet_template_t &outlet_template, CvMat *intrinsic_matrix, CvMat *distortion_params) |
| void | calc_outlet_coords (CvMat *rotation_vector, CvMat *translation_vector, const vector< cv::Point3f > &object_points, vector< outlet_t > &outlets) |
| void | calc_outlet_coords_ground (vector< outlet_t > &outlets, const outlet_template_t &outlet_template, CvMat *intrinsic_matrix, CvMat *distortion_params) |
| void | calc_outlet_dist_stat (const vector< outlet_t > &outlets, float &mean, float &stddev) |
| void | calc_outlet_tuple_dist_stat (const vector< outlet_t > &outlets, float &ground_dist_x1, float &ground_dist_x2, float &ground_dist_y) |
| IplImage * | calc_tuple_distance_map (IplImage *tuple_mask) |
| void | detect_outlets (IplImage *src, vector< outlet_feature_t > &features, vector< outlet_t > &outlets, outlet_tuple_t *outlet_tuple, const char *output_path, const char *filename) |
| void | draw_outlets (IplImage *temp, const vector< outlet_t > &outlets) |
| void | DrawKeypoints (IplImage *img, std::vector< outlet_feature_t > keypts) |
| void | estimateCameraPosition (const vector< cv::Point2f > &image_points, const vector< cv::Point3f > &object_points, CvMat *intrinsic_matrix, CvMat *distortion_params, CvMat *rotation_vector, CvMat *translation_vector) |
| void | extract_intensity_features (IplImage *grey, const vector< outlet_feature_t > &keypts, CvMat **mat, int equalize_hist, const vector< int > &labels, const char *buf) |
| void | filter_canny (IplImage *grey, vector< outlet_feature_t > &features) |
| void | filter_features_distance_mask (vector< outlet_feature_t > &features, IplImage *distance_map) |
| void | filter_features_mask (vector< outlet_feature_t > &features, IplImage *mask) |
| void | filter_negative_samples (const vector< CvRect > &rects, vector< outlet_feature_t > &keypts, float fraction) |
| void | filter_outlets (IplImage *grey, vector< outlet_t > &outlets, CvRTrees *rtrees) |
| void | filter_outlets_mask (vector< outlet_t > &outlets, IplImage *mask) |
| void | filter_outlets_size (vector< outlet_t > &outlets) |
| int | filter_outlets_templ (vector< outlet_t > &outlets, const char *filename) |
| void | filter_outlets_templ_ex (vector< outlet_t > &outlets, CvMat *map_matrix, IplImage *mask) |
| int | filter_outlets_templmatch (IplImage *src, vector< outlet_t > &outlets, IplImage *templ, const char *output_path, const char *filename, CvMat **homography, CvPoint3D32f *origin, CvPoint2D32f *scale) |
| void | filter_outlets_tuple (vector< outlet_t > &outlets, IplImage *tuple_mask, CvPoint2D32f hor_dir) |
| void | FilterPoints (IplImage *grey, vector< outlet_feature_t > &keypts, const CvRTrees *rtrees) |
| vector< outlet_feature_t > ::const_iterator | find_fartherst_hole (const vector< vector< outlet_feature_t >::const_iterator > &candidates, outlet_feature_t feature) |
| void | find_hole_candidates (IplImage *grey, IplImage *mask, CvSeq *socket, float hole_contrast, vector< CvSeq * > &holes) |
| void | find_holes (const vector< outlet_feature_t > &holes, vector< outlet_t > &outlets, IplImage *grey, IplImage *mask, IplImage *img) |
| int | find_origin_chessboard (IplImage *src, CvMat *map_matrix, CvPoint3D32f &origin, float bar_length) |
| void | find_outlet_features (IplImage *src, vector< outlet_feature_t > &features, const char *filename) |
| void | find_outlet_features_fast (IplImage *src, vector< outlet_feature_t > &features, float hole_contrast, const char *output_path, const char *filename) |
| int | find_outlet_position (outlet_t outlet, IplImage *tuple_mask) |
| void | findPreciseGroundHoleLocation (IplImage *grey, cv::Point2f center, cv::Point2f &hole) |
| void | findPreciseOutletLocations (IplImage *grey, const outlet_template_t &outlet_template, vector< outlet_t > &outlets) |
| void | findPreciseOutletLocationsAvg (IplImage *grey, const outlet_template_t &outlet_template, vector< outlet_t > &outlets) |
| void | findPrecisePowerHoleLocation (IplImage *grey, cv::Point2f center, cv::Point2f dir, cv::Point2f dir_perp, cv::Point2f &hole) |
| void | flipOutlet (std::vector< outlet_t > &outlets) |
| cv::Point3f | flipVector (cv::Point3f vec, cv::Point3f center) |
| int | generate_outlet_samples (IplImage *grey, outlet_t outlet, int count, CvMat **predictors, const char *filename) |
| void | get_outlet_coordinates (const outlet_t &outlet, CvPoint3D32f *points) |
| void | getImagePoints (const std::vector< outlet_t > &outlets, std::vector< cv::Point2f > &image_points, std::vector< bool > &is_detected) |
| CvRect | getOutletROI (const vector< outlet_t > &outlets) |
| int | is_outlet_inside_roi (const outlet_roi_t &outlet_roi, outlet_t outlet, string img_name) |
| int | is_point_incenter_roi (const vector< CvRect > &rects, CvPoint point) |
| int | is_point_inside_roi (const outlet_roi_t &outlet_roi, CvPoint point, string img_name) |
| int | is_point_inside_roi (const vector< CvRect > &rects, CvPoint point) |
| int | is_rect_inside_rect (CvRect large, CvRect smaller) |
| int | load_homography_map (const char *filename, CvMat **map_matrix) |
| IplImage * | load_match_template_mask (const char *filename) |
| CvPoint3D32f | map_point_rt (CvPoint3D32f point, CvMat *rotation_mat, CvMat *translation_vector) |
| void | move_features (vector< outlet_feature_t > &features, CvPoint origin) |
| bool | outlet_orient_pred_dist_greater (outlet_t outlet1, outlet_t outlet2) |
| bool | outlet_orient_pred_greater (outlet_t outlet1, outlet_t outlet2) |
| CvRect | outlet_rect (outlet_t outlet) |
| float | outlet_size (outlet_t outlet) |
| void | read_outlet_roi (const char *filename, outlet_roi_t &outlet_roi) |
| void | select_central_outlets (vector< outlet_t > &outlets, int count) |
| void | select_orient_outlets (CvPoint2D32f orientation, vector< outlet_t > &outlets, int count) |
| int | select_orient_outlets_ex (IplImage *grey, vector< outlet_t > &outlets, const char *filename) |
| int | test_adjacency (const vector< outlet_feature_t > &features, outlet_feature_t f) |
| void | train_outlet_model (const char *path, const char *config_filename, const char *roi_filename, const char *forest_filename) |
| CvMat * | vector2mat (const vector< int > &vec) |
| void | write_pr (const char *pr_filename, const char *image_filename, const outlet_roi_t &outlet_roi, const vector< outlet_t > &outlets) |
Variables | |
| const int | feature_count = xsize*ysize |
| const int | xsize = 11 |
| const int | ysize = 11 |
| float avgLine | ( | IplImage * | grey, | |
| cv::Point2f * | line_ends | |||
| ) |
Definition at line 2191 of file outlet_model.cpp.
| void calc_contrast_factor | ( | IplImage * | grey, | |
| CvRect | rect, | |||
| float & | contrast, | |||
| float & | variation | |||
| ) |
Definition at line 1397 of file outlet_model.cpp.
| void calc_labels | ( | const vector< CvRect > & | rects, | |
| const vector< outlet_feature_t > & | keypts, | |||
| vector< int > & | labels | |||
| ) |
Definition at line 853 of file outlet_model.cpp.
| int calc_outlet_coords | ( | vector< outlet_t > & | outlets, | |
| CvMat * | map_matrix, | |||
| CvPoint3D32f | origin, | |||
| CvPoint2D32f | scale, | |||
| CvMat * | rotation_vector, | |||
| CvMat * | translation_vector, | |||
| CvMat * | inv_map_matrix | |||
| ) |
Definition at line 1859 of file outlet_model.cpp.
| void calc_outlet_coords | ( | vector< outlet_t > & | outlets, | |
| const outlet_template_t & | outlet_template, | |||
| CvMat * | intrinsic_matrix, | |||
| CvMat * | distortion_params | |||
| ) |
Definition at line 1757 of file outlet_model.cpp.
| void calc_outlet_coords | ( | CvMat * | rotation_vector, | |
| CvMat * | translation_vector, | |||
| const vector< cv::Point3f > & | object_points, | |||
| vector< outlet_t > & | outlets | |||
| ) |
Definition at line 1742 of file outlet_model.cpp.
| void calc_outlet_coords_ground | ( | vector< outlet_t > & | outlets, | |
| const outlet_template_t & | outlet_template, | |||
| CvMat * | intrinsic_matrix, | |||
| CvMat * | distortion_params | |||
| ) |
Definition at line 1810 of file outlet_model.cpp.
| void calc_outlet_dist_stat | ( | const vector< outlet_t > & | outlets, | |
| float & | mean, | |||
| float & | stddev | |||
| ) |
Definition at line 1910 of file outlet_model.cpp.
| void calc_outlet_tuple_dist_stat | ( | const vector< outlet_t > & | outlets, | |
| float & | ground_dist_x1, | |||
| float & | ground_dist_x2, | |||
| float & | ground_dist_y | |||
| ) |
Definition at line 1925 of file outlet_model.cpp.
| IplImage* calc_tuple_distance_map | ( | IplImage * | tuple_mask | ) |
Definition at line 2001 of file outlet_model.cpp.
| void detect_outlets | ( | IplImage * | src, | |
| vector< outlet_feature_t > & | features, | |||
| vector< outlet_t > & | outlets, | |||
| outlet_tuple_t * | outlet_tuple, | |||
| const char * | output_path, | |||
| const char * | filename | |||
| ) |
Definition at line 631 of file outlet_model.cpp.
| void draw_outlets | ( | IplImage * | temp, | |
| const vector< outlet_t > & | outlets | |||
| ) |
Definition at line 1527 of file outlet_model.cpp.
| void DrawKeypoints | ( | IplImage * | img, | |
| std::vector< outlet_feature_t > | keypts | |||
| ) |
Definition at line 27 of file outlet_model.cpp.
| void estimateCameraPosition | ( | const vector< cv::Point2f > & | image_points, | |
| const vector< cv::Point3f > & | object_points, | |||
| CvMat * | intrinsic_matrix, | |||
| CvMat * | distortion_params, | |||
| CvMat * | rotation_vector, | |||
| CvMat * | translation_vector | |||
| ) |
Definition at line 1717 of file outlet_model.cpp.
| void extract_intensity_features | ( | IplImage * | grey, | |
| const vector< outlet_feature_t > & | keypts, | |||
| CvMat ** | mat, | |||
| int | equalize_hist, | |||
| const vector< int > & | labels, | |||
| const char * | buf | |||
| ) |
Definition at line 867 of file outlet_model.cpp.
| void filter_canny | ( | IplImage * | grey, | |
| vector< outlet_feature_t > & | features | |||
| ) |
Definition at line 1546 of file outlet_model.cpp.
| void filter_features_distance_mask | ( | vector< outlet_feature_t > & | features, | |
| IplImage * | distance_map | |||
| ) |
Definition at line 2021 of file outlet_model.cpp.
| void filter_features_mask | ( | vector< outlet_feature_t > & | features, | |
| IplImage * | mask | |||
| ) |
Definition at line 1986 of file outlet_model.cpp.
| void filter_negative_samples | ( | const vector< CvRect > & | rects, | |
| vector< outlet_feature_t > & | keypts, | |||
| float | fraction | |||
| ) |
Definition at line 1380 of file outlet_model.cpp.
| void filter_outlets | ( | IplImage * | grey, | |
| vector< outlet_t > & | outlets, | |||
| CvRTrees * | rtrees | |||
| ) |
Definition at line 1000 of file outlet_model.cpp.
| void filter_outlets_mask | ( | vector< outlet_t > & | outlets, | |
| IplImage * | mask | |||
| ) |
Definition at line 1970 of file outlet_model.cpp.
| void filter_outlets_size | ( | vector< outlet_t > & | outlets | ) |
Definition at line 2113 of file outlet_model.cpp.
| int filter_outlets_templ | ( | vector< outlet_t > & | outlets, | |
| const char * | filename | |||
| ) |
Definition at line 1651 of file outlet_model.cpp.
| void filter_outlets_templ_ex | ( | vector< outlet_t > & | outlets, | |
| CvMat * | map_matrix, | |||
| IplImage * | mask | |||
| ) |
Definition at line 1618 of file outlet_model.cpp.
| int filter_outlets_templmatch | ( | IplImage * | src, | |
| vector< outlet_t > & | outlets, | |||
| IplImage * | templ, | |||
| const char * | output_path, | |||
| const char * | filename, | |||
| CvMat ** | homography, | |||
| CvPoint3D32f * | origin, | |||
| CvPoint2D32f * | scale | |||
| ) |
Definition at line 736 of file outlet_model.cpp.
| void filter_outlets_tuple | ( | vector< outlet_t > & | outlets, | |
| IplImage * | tuple_mask, | |||
| CvPoint2D32f | hor_dir | |||
| ) |
Definition at line 2067 of file outlet_model.cpp.
| void FilterPoints | ( | IplImage * | grey, | |
| vector< outlet_feature_t > & | keypts, | |||
| const CvRTrees * | rtrees | |||
| ) |
Definition at line 964 of file outlet_model.cpp.
| vector<outlet_feature_t>::const_iterator find_fartherst_hole | ( | const vector< vector< outlet_feature_t >::const_iterator > & | candidates, | |
| outlet_feature_t | feature | |||
| ) |
Definition at line 173 of file outlet_model.cpp.
| void find_hole_candidates | ( | IplImage * | grey, | |
| IplImage * | mask, | |||
| CvSeq * | socket, | |||
| float | hole_contrast, | |||
| vector< CvSeq * > & | holes | |||
| ) |
Definition at line 37 of file outlet_model.cpp.
| void find_holes | ( | const vector< outlet_feature_t > & | holes, | |
| vector< outlet_t > & | outlets, | |||
| IplImage * | grey, | |||
| IplImage * | mask, | |||
| IplImage * | img | |||
| ) |
Definition at line 193 of file outlet_model.cpp.
| int find_origin_chessboard | ( | IplImage * | src, | |
| CvMat * | map_matrix, | |||
| CvPoint3D32f & | origin, | |||
| float | bar_length | |||
| ) |
Definition at line 1944 of file outlet_model.cpp.
| void find_outlet_features | ( | IplImage * | src, | |
| vector< outlet_feature_t > & | features, | |||
| const char * | filename | |||
| ) |
Definition at line 445 of file outlet_model.cpp.
| void find_outlet_features_fast | ( | IplImage * | src, | |
| vector< outlet_feature_t > & | features, | |||
| float | hole_contrast, | |||
| const char * | output_path, | |||
| const char * | filename | |||
| ) |
Definition at line 1041 of file outlet_model.cpp.
| int find_outlet_position | ( | outlet_t | outlet, | |
| IplImage * | tuple_mask | |||
| ) |
Definition at line 2052 of file outlet_model.cpp.
| void findPreciseGroundHoleLocation | ( | IplImage * | grey, | |
| cv::Point2f | center, | |||
| cv::Point2f & | hole | |||
| ) |
Definition at line 2232 of file outlet_model.cpp.
| void findPreciseOutletLocations | ( | IplImage * | grey, | |
| const outlet_template_t & | outlet_template, | |||
| vector< outlet_t > & | outlets | |||
| ) |
Definition at line 2153 of file outlet_model.cpp.
| void findPreciseOutletLocationsAvg | ( | IplImage * | grey, | |
| const outlet_template_t & | outlet_template, | |||
| vector< outlet_t > & | outlets | |||
| ) |
Definition at line 2250 of file outlet_model.cpp.
| void findPrecisePowerHoleLocation | ( | IplImage * | grey, | |
| cv::Point2f | center, | |||
| cv::Point2f | dir, | |||
| cv::Point2f | dir_perp, | |||
| cv::Point2f & | hole | |||
| ) |
Definition at line 2206 of file outlet_model.cpp.
| void flipOutlet | ( | std::vector< outlet_t > & | outlets | ) |
Definition at line 2303 of file outlet_model.cpp.
| cv::Point3f flipVector | ( | cv::Point3f | vec, | |
| cv::Point3f | center | |||
| ) |
Definition at line 2296 of file outlet_model.cpp.
| int generate_outlet_samples | ( | IplImage * | grey, | |
| outlet_t | outlet, | |||
| int | count, | |||
| CvMat ** | predictors, | |||
| const char * | filename | |||
| ) |
Definition at line 1249 of file outlet_model.cpp.
| void get_outlet_coordinates | ( | const outlet_t & | outlet, | |
| CvPoint3D32f * | points | |||
| ) |
Definition at line 2106 of file outlet_model.cpp.
| void getImagePoints | ( | const std::vector< outlet_t > & | outlets, | |
| std::vector< cv::Point2f > & | image_points, | |||
| std::vector< bool > & | is_detected | |||
| ) |
Definition at line 1698 of file outlet_model.cpp.
| CvRect getOutletROI | ( | const vector< outlet_t > & | outlets | ) |
Definition at line 2132 of file outlet_model.cpp.
| int is_outlet_inside_roi | ( | const outlet_roi_t & | outlet_roi, | |
| outlet_t | outlet, | |||
| string | img_name | |||
| ) |
Definition at line 1234 of file outlet_model.cpp.
| int is_point_incenter_roi | ( | const vector< CvRect > & | rects, | |
| CvPoint | point | |||
| ) |
Definition at line 812 of file outlet_model.cpp.
| int is_point_inside_roi | ( | const outlet_roi_t & | outlet_roi, | |
| CvPoint | point, | |||
| string | img_name | |||
| ) |
Definition at line 826 of file outlet_model.cpp.
| int is_point_inside_roi | ( | const vector< CvRect > & | rects, | |
| CvPoint | point | |||
| ) |
Definition at line 799 of file outlet_model.cpp.
| int is_rect_inside_rect | ( | CvRect | large, | |
| CvRect | smaller | |||
| ) | [inline] |
Definition at line 840 of file outlet_model.cpp.
| int load_homography_map | ( | const char * | filename, | |
| CvMat ** | map_matrix | |||
| ) |
Definition at line 1602 of file outlet_model.cpp.
| IplImage* load_match_template_mask | ( | const char * | filename | ) |
Definition at line 1593 of file outlet_model.cpp.
| CvPoint3D32f map_point_rt | ( | CvPoint3D32f | point, | |
| CvMat * | rotation_mat, | |||
| CvMat * | translation_vector | |||
| ) |
Definition at line 1679 of file outlet_model.cpp.
| void move_features | ( | vector< outlet_feature_t > & | features, | |
| CvPoint | origin | |||
| ) |
Definition at line 622 of file outlet_model.cpp.
Definition at line 1432 of file outlet_model.cpp.
Definition at line 1427 of file outlet_model.cpp.
| CvRect outlet_rect | ( | outlet_t | outlet | ) |
Definition at line 609 of file outlet_model.cpp.
| float outlet_size | ( | outlet_t | outlet | ) | [inline] |
Definition at line 603 of file outlet_model.cpp.
| void read_outlet_roi | ( | const char * | filename, | |
| outlet_roi_t & | outlet_roi | |||
| ) |
Definition at line 783 of file outlet_model.cpp.
| void select_central_outlets | ( | vector< outlet_t > & | outlets, | |
| int | count | |||
| ) |
Definition at line 1438 of file outlet_model.cpp.
| void select_orient_outlets | ( | CvPoint2D32f | orientation, | |
| vector< outlet_t > & | outlets, | |||
| int | count | |||
| ) |
Definition at line 1445 of file outlet_model.cpp.
| int select_orient_outlets_ex | ( | IplImage * | grey, | |
| vector< outlet_t > & | outlets, | |||
| const char * | filename | |||
| ) |
Definition at line 1481 of file outlet_model.cpp.
| int test_adjacency | ( | const vector< outlet_feature_t > & | features, | |
| outlet_feature_t | f | |||
| ) |
Definition at line 426 of file outlet_model.cpp.
| void train_outlet_model | ( | const char * | path, | |
| const char * | config_filename, | |||
| const char * | roi_filename, | |||
| const char * | forest_filename | |||
| ) |
Definition at line 1300 of file outlet_model.cpp.
| CvMat* vector2mat | ( | const vector< int > & | vec | ) |
Definition at line 953 of file outlet_model.cpp.
| void write_pr | ( | const char * | pr_filename, | |
| const char * | image_filename, | |||
| const outlet_roi_t & | outlet_roi, | |||
| const vector< outlet_t > & | outlets | |||
| ) |
Definition at line 1363 of file outlet_model.cpp.
| const int feature_count = xsize*ysize |
Definition at line 25 of file outlet_model.cpp.
| const int xsize = 11 |
Definition at line 23 of file outlet_model.cpp.
| const int ysize = 11 |
Definition at line 24 of file outlet_model.cpp.

