computing inverse position kinematics using Levenberg-Marquardt. More...
#include "chainiksolverpos_lma.hpp"#include "chain.hpp"#include "frames.hpp"#include "framevel.hpp"#include "frameacc.hpp"#include "jntarray.hpp"#include "jntarrayvel.hpp"#include "jntarrayacc.hpp"#include <Eigen/Dense>#include <iostream>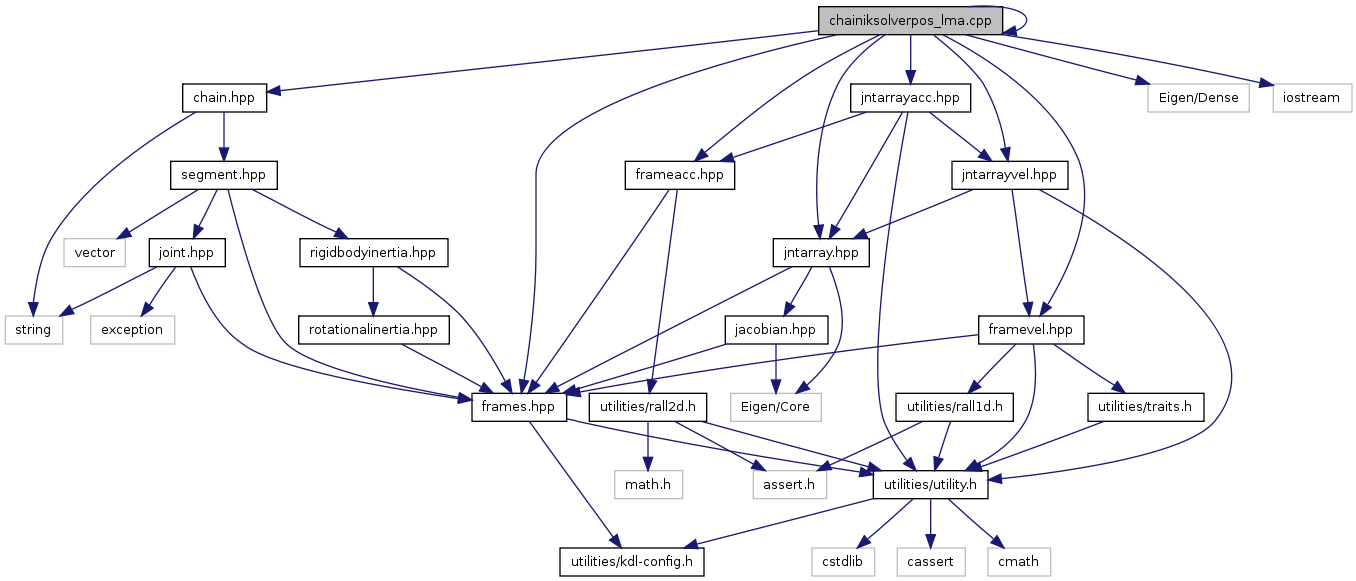

Go to the source code of this file.
Namespaces | |
| namespace | KDL |
Functions | |
| template<typename Derived > | |
| void | KDL::Twist_to_Eigen (const KDL::Twist &t, Eigen::MatrixBase< Derived > &e) |
computing inverse position kinematics using Levenberg-Marquardt.
Definition in file chainiksolverpos_lma.cpp.

