#include <nav_msgs/OccupancyGrid.h>#include <geometry_msgs/Pose.h>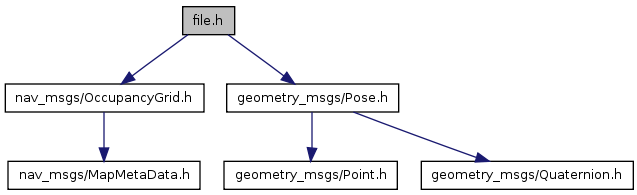
Go to the source code of this file.
Namespaces | |
| namespace | occupancy_grid_utils |
Functions | |
| geometry_msgs::Pose | occupancy_grid_utils::identityPose () |
| nav_msgs::OccupancyGrid::Ptr | occupancy_grid_utils::loadGrid (const std::string &fname, double resolution=1.0, const geometry_msgs::Pose &origin=identityPose()) |
| Load an occ grid from an image file. | |
Variables | |
| const double | occupancy_grid_utils::DEFAULT_FREE_THRESHOLD = 0.196 |
| const double | occupancy_grid_utils::DEFAULT_OCC_THRESHOLD = 0.65 |
Loading/saving occ grids
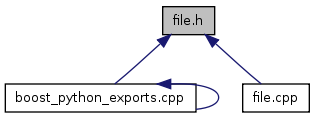
Definition in file file.h.

