#include <vector>#include <list>#include <string>#include <ros/time.h>#include <costmap_2d/observation.h>#include <tf/transform_listener.h>#include <tf/transform_datatypes.h>#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl_ros/transforms.h>#include <pcl/ros/conversions.h>#include <boost/thread.hpp>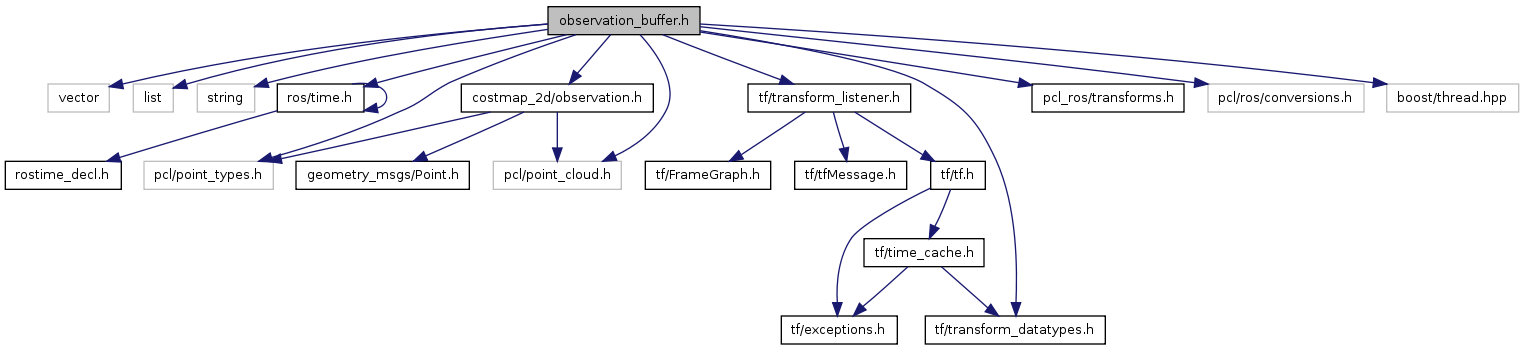
Go to the source code of this file.
Classes | |
| class | costmap_2d::ObservationBuffer |
| Takes in point clouds from sensors, transforms them to the desired frame, and stores them. More... | |
Namespaces | |
| namespace | costmap_2d |

