#include "constraint_aware_spline_smoother/ParabolicRamp.h"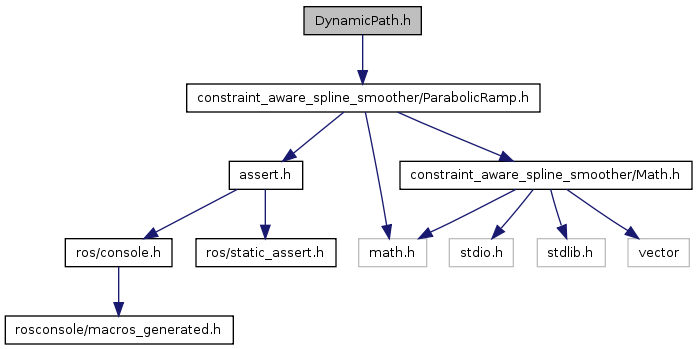
Go to the source code of this file.
Classes | |
| class | DistanceCheckerBase |
| A base class for a distance checker. ObstacleDistance returns the radius of a L-z norm guaranteed to be collision-free. ObstacleDistanceNorm returns the value of z. More... | |
| class | DynamicPath |
| A bounded-velocity, bounded-acceleration trajectory consisting of parabolic ramps. More... | |
| class | FeasibilityCheckerBase |
| A base class for a feasibility checker. More... | |

