#include <limits>#include "collision_checking/BVH_defs.h"#include "collision_checking/BVH_model.h"#include "collision_checking/BVH_front.h"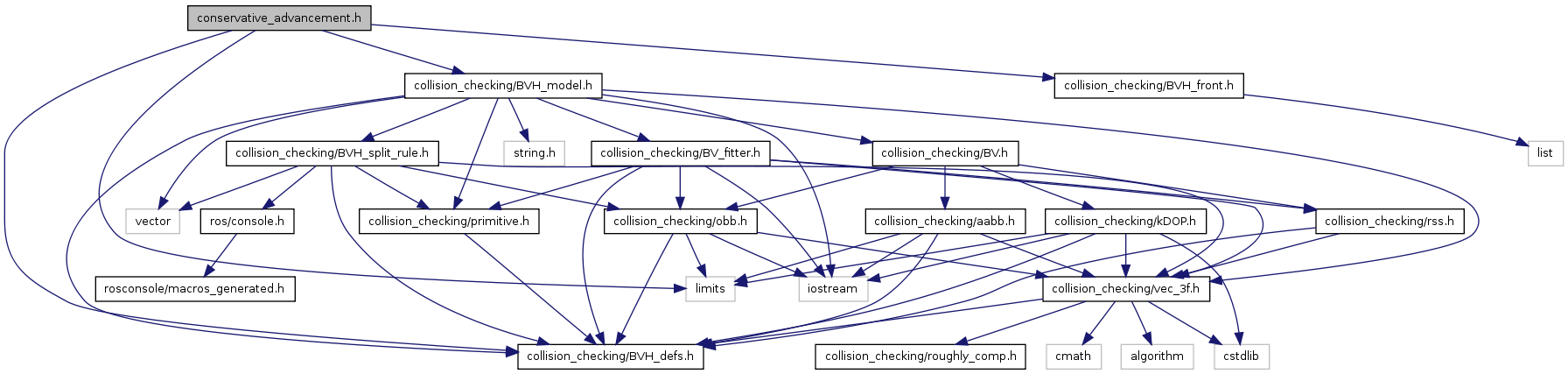
Go to the source code of this file.
Classes | |
| struct | collision_checking::BVH_CAResult |
| class | collision_checking::InterpMotion |
| Linear interpolation motion Each Motion is assumed to have constant linear velocity and angular velocity. More... | |
| struct | collision_checking::InterpMotion::SimpleQuaternion |
| Quaternion used locally by InterpMotion. More... | |
| struct | collision_checking::InterpMotion::SimpleTransform |
| Simple transform class used locally by InterpMotion. More... | |
Namespaces | |
| namespace | collision_checking |
Main namespace. | |
Functions | |
| void | collision_checking::conservativeAdvancementRecurse (BVNode< RSS > *tree1, BVNode< RSS > *tree2, const Vec3f R[3], const Vec3f &T, int b1, int b2, Vec3f *vertices1, Vec3f *vertices2, Triangle *tri_indices1, Triangle *tri_indices2, BVH_CAResult *res, BVHFrontList *front_list=NULL) |
| Recursive conservative advancement kernel between two RSS trees. | |
| void | collision_checking::continuousCollide_CA (const BVHModel< RSS > &model1, const Vec3f R1_1[3], const Vec3f &T1_1, const Vec3f R1_2[3], const Vec3f &T1_2, const BVHModel< RSS > &model2, const Vec3f R2_1[3], const Vec3f &T2_1, const Vec3f R2_2[3], const Vec3f &T2_2, BVH_CAResult *res, BVHFrontList *front_list=NULL) |
| Continuous collision detection query between two RSS models based on conservative advancement. | |

