#include <geometry_msgs/PoseStamped.h>#include <ros/ros.h>#include <boost/optional.hpp>#include <boost/thread.hpp>#include <boost/circular_buffer.hpp>
Go to the source code of this file.
Classes | |
| class | cart_local_planner::SBPLSubscriber< SBPLPlan > |
Namespaces | |
| namespace | cart_local_planner |
Allows subscribing to sbpl over a backchannel and synchronizing with the global plan provided by move_base
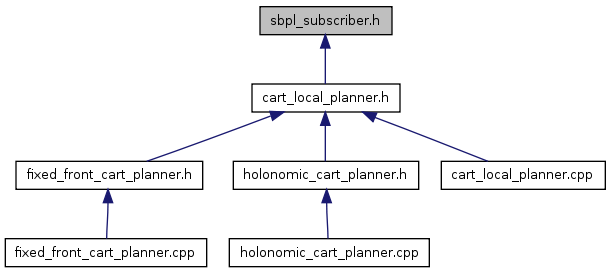
Definition in file sbpl_subscriber.h.

