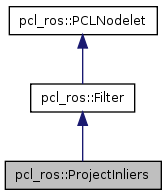
ProjectInliers uses a model and a set of inlier indices from a PointCloud to project them into a separate PointCloud. More...
#include <project_inliers.h>
Public Member Functions | |
| ProjectInliers () | |
Protected Member Functions | |
| void | filter (const PointCloud2::ConstPtr &input, const IndicesConstPtr &indices, PointCloud2 &output) |
| Call the actual filter. | |
Private Member Functions | |
| void | input_indices_model_callback (const PointCloud2::ConstPtr &cloud, const PointIndicesConstPtr &indices, const ModelCoefficientsConstPtr &model) |
| PointCloud2 + Indices + Model data callback. | |
| virtual void | onInit () |
| Nodelet initialization routine. | |
Private Attributes | |
| pcl::ProjectInliers< PointCloud2 > | impl_ |
| The PCL filter implementation used. | |
| ModelCoefficientsConstPtr | model_ |
| A pointer to the vector of model coefficients. | |
| message_filters::Subscriber < ModelCoefficients > | sub_model_ |
| The message filter subscriber for model coefficients. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ApproximateTime < PointCloud2, PointIndices, ModelCoefficients > > > | sync_input_indices_model_a_ |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ExactTime < PointCloud2, PointIndices, ModelCoefficients > > > | sync_input_indices_model_e_ |
| Synchronized input, indices, and model coefficients. | |
ProjectInliers uses a model and a set of inlier indices from a PointCloud to project them into a separate PointCloud.
Definition at line 51 of file project_inliers.h.
| pcl_ros::ProjectInliers::ProjectInliers | ( | ) | [inline] |
Definition at line 45 of file project_inliers.h.
| void pcl_ros::ProjectInliers::filter | ( | const PointCloud2::ConstPtr & | input, | |
| const IndicesConstPtr & | indices, | |||
| PointCloud2 & | output | |||
| ) | [inline, protected, virtual] |
Call the actual filter.
| input | the input point cloud dataset | |
| indices | the input set of indices to use from input | |
| output | the resultant filtered dataset |
Implements pcl_ros::Filter.
Definition at line 54 of file project_inliers.h.
| void pcl_ros::ProjectInliers::input_indices_model_callback | ( | const PointCloud2::ConstPtr & | cloud, | |
| const PointIndicesConstPtr & | indices, | |||
| const ModelCoefficientsConstPtr & | model | |||
| ) | [private] |
PointCloud2 + Indices + Model data callback.
Definition at line 109 of file project_inliers.cpp.
| void pcl_ros::ProjectInliers::onInit | ( | ) | [private, virtual] |
Nodelet initialization routine.
Reimplemented from pcl_ros::Filter.
Definition at line 43 of file project_inliers.cpp.
The PCL filter implementation used.
Definition at line 74 of file project_inliers.h.
A pointer to the vector of model coefficients.
Definition at line 65 of file project_inliers.h.
message_filters::Subscriber<ModelCoefficients> pcl_ros::ProjectInliers::sub_model_ [private] |
The message filter subscriber for model coefficients.
Definition at line 68 of file project_inliers.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ApproximateTime<PointCloud2, PointIndices, ModelCoefficients> > > pcl_ros::ProjectInliers::sync_input_indices_model_a_ [private] |
Definition at line 72 of file project_inliers.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ExactTime<PointCloud2, PointIndices, ModelCoefficients> > > pcl_ros::ProjectInliers::sync_input_indices_model_e_ [private] |
Synchronized input, indices, and model coefficients.
Definition at line 71 of file project_inliers.h.

