#include <pcl/kdtree/kdtree.h>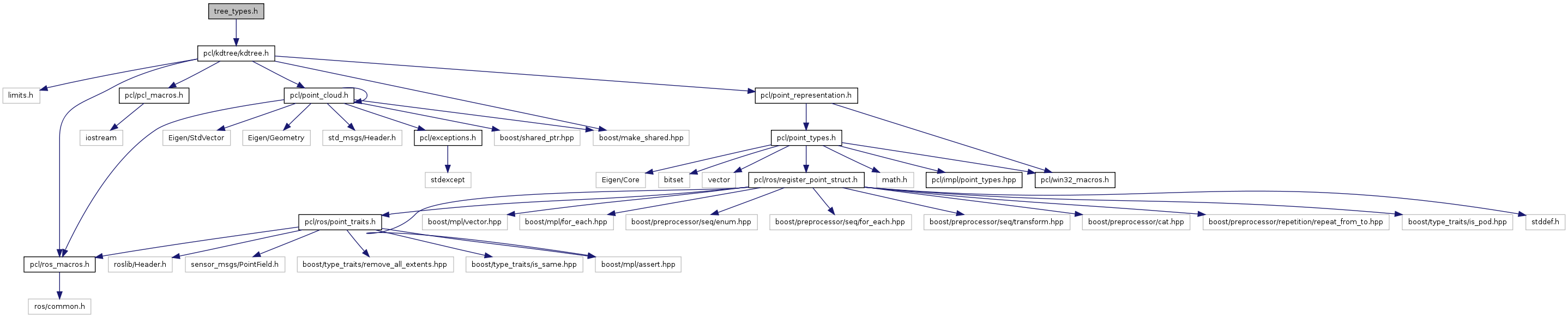

Go to the source code of this file.
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename PointT > | |
| void | pcl::initTree (const int &spatial_locator, boost::shared_ptr< pcl::KdTree< PointT > > &tree, int k=0) |
| Initialize the spatial locator used for nearest neighbor search. | |
Variables | |
| static const int | pcl::KDTREE_FLANN = 0 |
| static const int | pcl::KDTREE_ORGANIZED_INDEX = 1 |

