Implements the Puma560 robot subclass that has an analytic IK solution. More...
#include "puma560.h"#include "robot.h"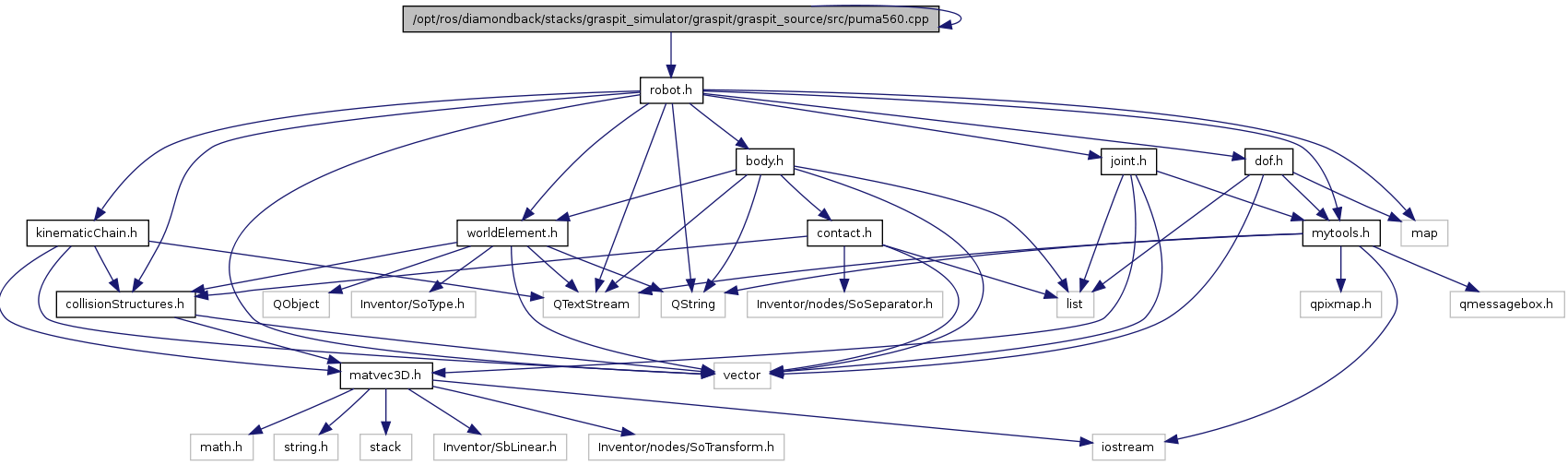

Go to the source code of this file.
Classes | |
| struct | Puma560Solution |
| Structure used for Puma inverse kinematics. More... | |
Defines | |
| #define | JOINT_DIST_EPSILON .05 |
Implements the Puma560 robot subclass that has an analytic IK solution.
Definition in file puma560.cpp.
| #define JOINT_DIST_EPSILON .05 |
Definition at line 46 of file puma560.cpp.

