Defines the grasp_tester class (part of grasp planner). More...
#include <QObject>#include <QFile>#include <QTextStream>#include <vector>#include "matvec3D.h"#include "collisionStructures.h"#include "grasp_directions.h"#include "grasp_coordinates.h"#include <list>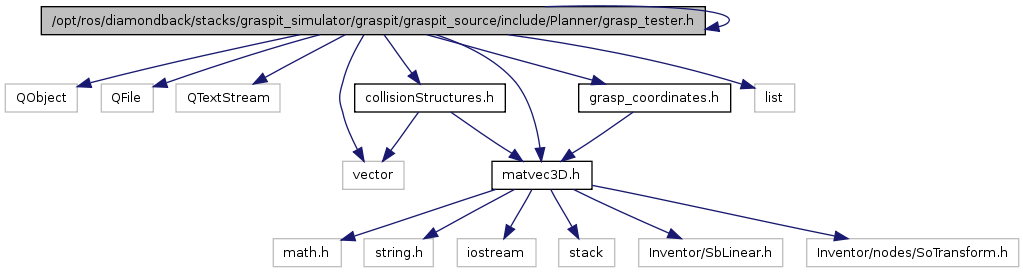

Go to the source code of this file.
Classes | |
| class | grasp_tester |
| This class is used to evaluate a set of candidate grasps. More... | |
Defines | |
| #define | BACK_ITERATION_STEP_SIZE 4.0 |
| #define | DEG_2_RAD M_PI/180.0 |
| #define | MAX_ITERATION_STEPS_PER_GRASP 20 |
| #define | QUALITY_MIN_THRESHOLD 0.0 |
Defines the grasp_tester class (part of grasp planner).
Definition in file grasp_tester.h.
| #define BACK_ITERATION_STEP_SIZE 4.0 |
Definition at line 49 of file grasp_tester.h.
| #define DEG_2_RAD M_PI/180.0 |
Definition at line 51 of file grasp_tester.h.
| #define MAX_ITERATION_STEPS_PER_GRASP 20 |
Definition at line 46 of file grasp_tester.h.
| #define QUALITY_MIN_THRESHOLD 0.0 |
Definition at line 41 of file grasp_tester.h.

