Implements several types of coordinates classes (used in the grasp planner). More...
#include <math.h>#include "grasp_coordinates.h"#include <iostream>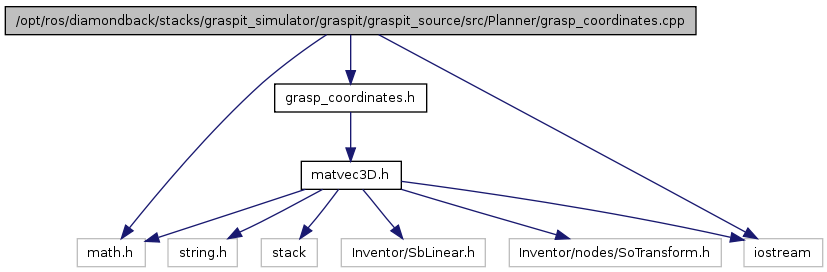
Go to the source code of this file.
Defines | |
| #define | cout std::cout |
| #define | endl std::endl |
Implements several types of coordinates classes (used in the grasp planner).
Definition in file grasp_coordinates.cpp.
| #define cout std::cout |
Definition at line 43 of file grasp_coordinates.cpp.
| #define endl std::endl |
Definition at line 44 of file grasp_coordinates.cpp.

