Defines the contact class hierarchy. More...
#include <Inventor/nodes/SoSeparator.h>#include <list>#include <vector>#include "collisionStructures.h"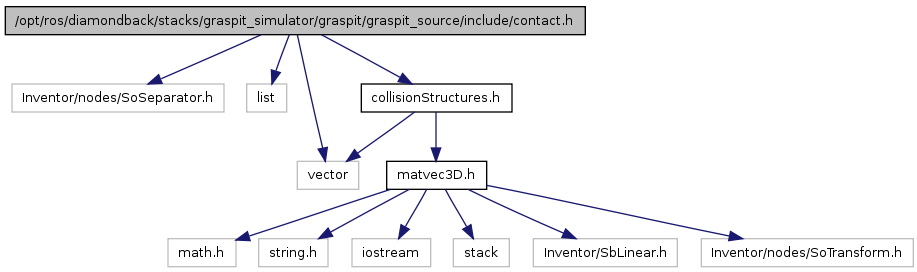

Go to the source code of this file.
Classes | |
| class | Contact |
| A contact between 2 bodies. More... | |
| class | PointContact |
| A Point Contact With Friction (PCWF) implementing a Coulomb friction model. More... | |
| class | SoftContact |
| Soft Contact implements an SFC model for contacts between soft bodies. More... | |
| class | VirtualContact |
| A contact that exists even when a hand is not perfectly touching another object. More... | |
| class | VirtualContactOnObject |
| struct | Wrench |
| A wrench is a 6-vector containing 2 3-vectors for the force and torque components. More... | |
Defines | |
| #define | CONTACT_HXX |
| #define | DISPLAY_CONE_SCALE 20.0 |
| #define | MAX_FRICTION_EDGES 100 |
Enumerations | |
| enum | frictionT { FL, PCWF, SFCE, SFCL } |
Friction type: Frictionless, Point contact with friction, Soft finger contact with elliptic approximation, Soft finger contact with linearized elliptic approximation. More... | |
Defines the contact class hierarchy.
Definition in file contact.h.

