A number of global functions that are used by the GraspIt world to set up new contacts between bodies. We should find a home for them inside a class at some point. More...
#include "collisionStructures.h"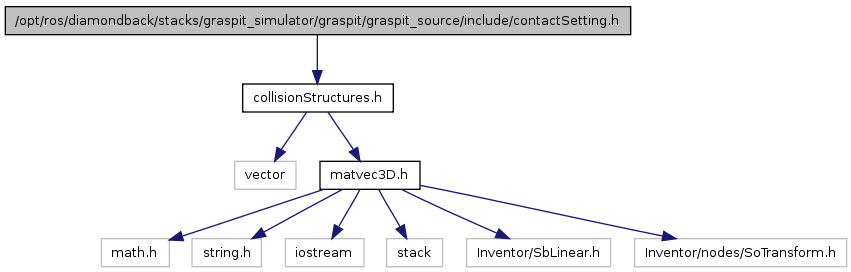

Go to the source code of this file.
Functions | |
| void | addContacts (Body *body1, Body *body2, ContactReport &contactSet, bool softContactsOn=false) |
| Adds a new pair of contacts between two bodies. | |
| void | addVirtualContacts (Body *body1, int f, int l, Body *body2, ContactReport &contactSet, bool softContactsOn) |
| Adds a virtual contact on a body pointing at another body. | |
A number of global functions that are used by the GraspIt world to set up new contacts between bodies. We should find a home for them inside a class at some point.
Definition in file contactSetting.h.
| void addContacts | ( | Body * | body1, | |
| Body * | body2, | |||
| ContactReport & | contactSet, | |||
| bool | softContactsOn | |||
| ) |
Adds a new pair of contacts between two bodies.
Takes pointers to the two bodies in contact, and the set of contacts returned from the collision detection system, and adds a contact to each body for each contact in the set.
Definition at line 189 of file contactSetting.cpp.
| void addVirtualContacts | ( | Body * | body1, | |
| int | f, | |||
| int | l, | |||
| Body * | body2, | |||
| ContactReport & | contactSet, | |||
| bool | softContactsOn | |||
| ) |
Adds a virtual contact on a body pointing at another body.
Adds a virtual contact on the body body1, which is assumed to be the l-th link on the f-th finger of a robot. Works by first creating a traditional contact, then converting it to a virtual contact.
The whole VirtualContact scheme is in bad need of an overhaul.
Definition at line 268 of file contactSetting.cpp.

