An interface the trajectory controller uses to interact with the world regardless of the underlying world model. More...
#include <world_model.h>
Public Member Functions | |
| virtual double | footprintCost (const geometry_msgs::Point &position, const std::vector< geometry_msgs::Point > &footprint, double inscribed_radius, double circumscribed_radius)=0 |
| Subclass will implement this method to check a footprint at a given position and orientation for legality in the world. | |
| virtual | ~WorldModel () |
| Subclass will implement a destructor. | |
Protected Member Functions | |
| WorldModel () | |
An interface the trajectory controller uses to interact with the world regardless of the underlying world model.
Definition at line 51 of file world_model.h.
| virtual base_local_planner::WorldModel::~WorldModel | ( | ) | [inline, virtual] |
Subclass will implement a destructor.
Definition at line 67 of file world_model.h.
| base_local_planner::WorldModel::WorldModel | ( | ) | [inline, protected] |
Definition at line 70 of file world_model.h.
| virtual double base_local_planner::WorldModel::footprintCost | ( | const geometry_msgs::Point & | position, | |
| const std::vector< geometry_msgs::Point > & | footprint, | |||
| double | inscribed_radius, | |||
| double | circumscribed_radius | |||
| ) | [pure virtual] |
Subclass will implement this method to check a footprint at a given position and orientation for legality in the world.
| position | The position of the robot in world coordinates | |
| footprint | The specification of the footprint of the robot in world coordinates | |
| inscribed_radius | The radius of the inscribed circle of the robot | |
| circumscribed_radius | The radius of the circumscribed circle of the robot |
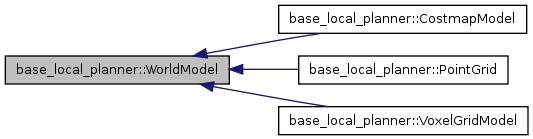
Implemented in base_local_planner::CostmapModel, base_local_planner::PointGrid, and base_local_planner::VoxelGridModel.

