#include <ros/ros.h>#include "ros/time.h"#include "ros/console.h"#include "ros/assert.h"#include "ros/common.h"#include "ros/types.h"#include "ros/node_handle.h"#include "ros/publisher.h"#include "ros/forwards.h"#include "ros/message.h"#include "ros/serialization.h"#include <boost/utility.hpp>#include "ros/service_server.h"#include "ros/subscriber.h"#include <string>#include "ros/service_traits.h"#include "forwards.h"#include <boost/shared_ptr.hpp>#include "ros/init.h"#include "XmlRpcValue.h"#include "node_handle.h"#include "ros/names.h"#include <vector>#include <ostream>#include "ros/builtin_message_traits.h"#include "ros/message_operations.h"#include "art_msgs/DriverState.h"#include "art_msgs/CarDrive.h"#include <art_pilot/PilotConfig.h>#include <ros/ros.h>
Go to the source code of this file.
Classes | |
| class | pilot::AccelBase |
Namespaces | |
| namespace | pilot |
Typedefs | |
| typedef boost::shared_ptr < AccelBase > | pilot::AccelBasePtr |
Functions | |
| AccelBasePtr | pilot::allocAccel (art_pilot::PilotConfig &config) |
| static float | pilot::clamp (float lower, float value, float upper) |
| static float | pilot::signum (float value) |
ART pilot acceleration controller abstract base class.
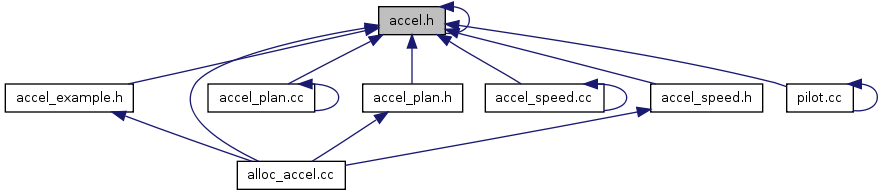
Definition in file accel.h.

