#include <map>#include <vector>#include "tf/transform_datatypes.h"#include "tf2_ros/buffer.h"#include "tf2_geometry_msgs/tf2_geometry_msgs.h"#include "sensor_msgs/LaserScan.h"#include "geometry_msgs/PoseWithCovarianceStamped.h"#include "slam_toolbox/toolbox_msgs.hpp"#include "karto_sdk/Mapper.h"
Include dependency graph for toolbox_types.hpp:

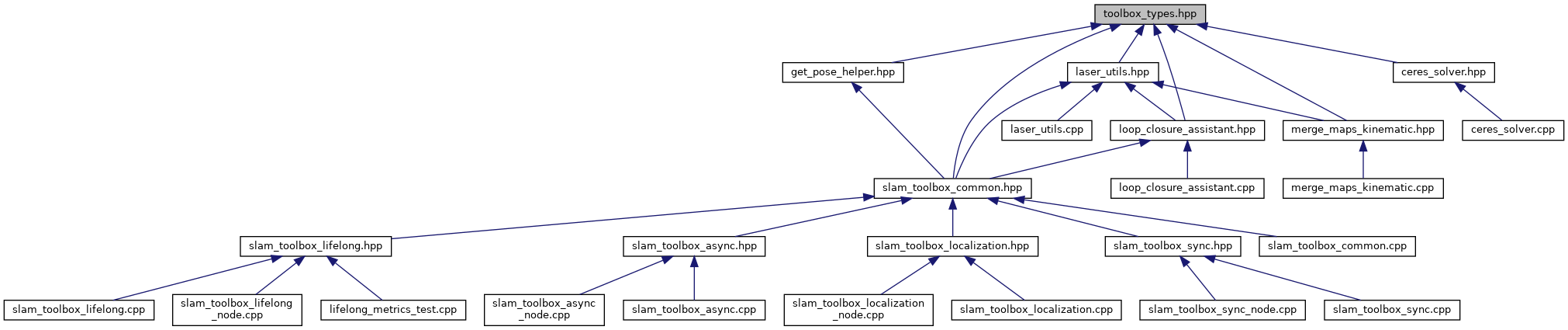
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | toolbox_types::PausedState |
| struct | toolbox_types::PosedScan |
| struct | toolbox_types::ScoredVertex |
Namespaces | |
| toolbox_types | |
Macros | |
| #define | MAP_IDX(sx, i, j) ((sx) * (j) + (i)) |
Typedefs | |
| typedef std::unordered_map< int, Eigen::Vector3d >::const_iterator | toolbox_types::ConstGraphIterator |
| typedef std::vector< karto::Edge< karto::LocalizedRangeScan > * > | toolbox_types::EdgeVector |
| typedef std::unordered_map< int, Eigen::Vector3d >::iterator | toolbox_types::GraphIterator |
| typedef slam_toolbox_msgs::DeserializePoseGraph::Request | toolbox_types::procType |
| typedef std::map< int, karto::Vertex< karto::LocalizedRangeScan > * > | toolbox_types::ScanMap |
| typedef std::vector< karto::Vertex< karto::LocalizedRangeScan > * > | toolbox_types::ScanVector |
| typedef std::vector< ScoredVertex > | toolbox_types::ScoredVertices |
| typedef std::map< karto::Name, std::map< int, karto::Vertex< karto::LocalizedRangeScan > * > > | toolbox_types::VerticeMap |
| typedef std::vector< karto::Vertex< karto::LocalizedRangeScan > * > | toolbox_types::Vertices |
Enumerations | |
| enum | toolbox_types::PausedApplication { toolbox_types::PROCESSING = 0, toolbox_types::VISUALIZING_GRAPH = 1, toolbox_types::NEW_MEASUREMENTS = 2 } |
| enum | toolbox_types::ProcessType { toolbox_types::PROCESS = 0, toolbox_types::PROCESS_FIRST_NODE = 1, toolbox_types::PROCESS_NEAR_REGION = 2, toolbox_types::PROCESS_LOCALIZATION = 3 } |
Macro Definition Documentation
◆ MAP_IDX
| #define MAP_IDX | ( | sx, | |
| i, | |||
| j | |||
| ) | ((sx) * (j) + (i)) |
Definition at line 34 of file toolbox_types.hpp.