#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <tf/message_filter.h>#include <tf/transform_listener.h>#include <boost/bind.hpp>#include <boost/scoped_ptr.hpp>#include <pcl_ros/point_cloud.h>#include <pcl_conversions/pcl_conversions.h>#include <ros/ros.h>#include <gtest/gtest.h>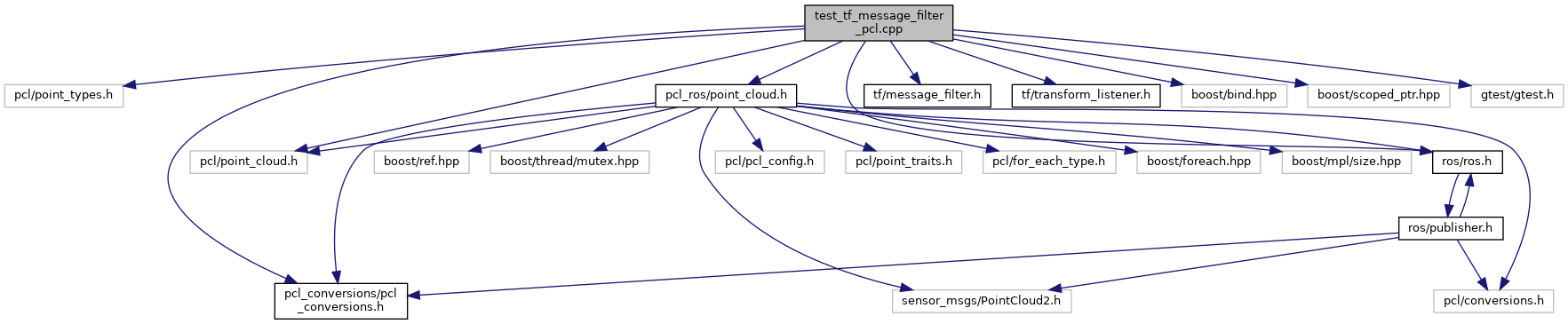
Go to the source code of this file.
Classes | |
| class | Notification |
Typedefs | |
| typedef pcl::PointCloud< pcl::PointXYZRGBNormal > | PCDType |
Functions | |
| int | main (int argc, char **argv) |
| void | setStamp (ros::Time &stamp, std::uint64_t &pcl_stamp) |
| TEST (MessageFilter, emptyFrameIDFailure) | |
| TEST (MessageFilter, multipleTargetFrames) | |
| TEST (MessageFilter, noTransforms) | |
| TEST (MessageFilter, noTransformsSameFrame) | |
| TEST (MessageFilter, outTheBackFailure) | |
| TEST (MessageFilter, postTransforms) | |
| TEST (MessageFilter, preexistingTransforms) | |
| TEST (MessageFilter, queueSize) | |
| TEST (MessageFilter, removeCallback) | |
| TEST (MessageFilter, setTargetFrame) | |
| TEST (MessageFilter, tolerance) | |
Typedef Documentation
◆ PCDType
| typedef pcl::PointCloud<pcl::PointXYZRGBNormal> PCDType |
Definition at line 54 of file test_tf_message_filter_pcl.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 380 of file test_tf_message_filter_pcl.cpp.
◆ setStamp()
| void setStamp | ( | ros::Time & | stamp, |
| std::uint64_t & | pcl_stamp | ||
| ) |
Sets pcl_stamp from stamp, BUT alters stamp a little to round it to millisecond. This is because converting back and forth from pcd to ros time induces some rounding errors.
Definition at line 60 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [1/11]
| TEST | ( | MessageFilter | , |
| emptyFrameIDFailure | |||
| ) |
Definition at line 337 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [2/11]
| TEST | ( | MessageFilter | , |
| multipleTargetFrames | |||
| ) |
Definition at line 235 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [3/11]
| TEST | ( | MessageFilter | , |
| noTransforms | |||
| ) |
Definition at line 102 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [4/11]
| TEST | ( | MessageFilter | , |
| noTransformsSameFrame | |||
| ) |
Definition at line 118 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [5/11]
| TEST | ( | MessageFilter | , |
| outTheBackFailure | |||
| ) |
Definition at line 314 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [6/11]
| TEST | ( | MessageFilter | , |
| postTransforms | |||
| ) |
Definition at line 155 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [7/11]
| TEST | ( | MessageFilter | , |
| preexistingTransforms | |||
| ) |
Definition at line 134 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [8/11]
| TEST | ( | MessageFilter | , |
| queueSize | |||
| ) |
Definition at line 180 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [9/11]
| TEST | ( | MessageFilter | , |
| removeCallback | |||
| ) |
Definition at line 351 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [10/11]
| TEST | ( | MessageFilter | , |
| setTargetFrame | |||
| ) |
Definition at line 213 of file test_tf_message_filter_pcl.cpp.
◆ TEST() [11/11]
| TEST | ( | MessageFilter | , |
| tolerance | |||
| ) |
Definition at line 273 of file test_tf_message_filter_pcl.cpp.