PointCloudConcatenateFieldsSynchronizer is a special form of data synchronizer: it listens for a set of input PointCloud messages on the same topic, checks their timestamps, and concatenates their fields together into a single PointCloud output message. More...
#include <concatenate_fields.h>
Public Types | |
| typedef sensor_msgs::PointCloud2 | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Public Member Functions | |
| void | input_callback (const PointCloudConstPtr &cloud) |
| void | onInit () |
| PointCloudConcatenateFieldsSynchronizer () | |
| Empty constructor. More... | |
| PointCloudConcatenateFieldsSynchronizer (int queue_size) | |
| Empty constructor. More... | |
| void | subscribe () |
| void | unsubscribe () |
| virtual | ~PointCloudConcatenateFieldsSynchronizer () |
| Empty destructor. More... | |
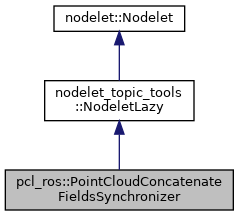
 Public Member Functions inherited from nodelet_topic_tools::NodeletLazy Public Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| NodeletLazy () | |
| Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
Private Attributes | |
| int | input_messages_ |
| The number of input messages that we expect on the input topic. More... | |
| int | maximum_queue_size_ |
| The maximum number of messages that we can store in the queue. More... | |
| double | maximum_seconds_ |
| The maximum number of seconds to wait until we drop the synchronization. More... | |
| ros::Publisher | pub_output_ |
| The output PointCloud publisher. More... | |
| std::map< ros::Time, std::vector< PointCloudConstPtr > > | queue_ |
| A queue for messages. More... | |
| ros::Subscriber | sub_input_ |
| The input PointCloud subscriber. More... | |
Detailed Description
PointCloudConcatenateFieldsSynchronizer is a special form of data synchronizer: it listens for a set of input PointCloud messages on the same topic, checks their timestamps, and concatenates their fields together into a single PointCloud output message.
Definition at line 53 of file concatenate_fields.h.
Member Typedef Documentation
◆ PointCloud
| typedef sensor_msgs::PointCloud2 pcl_ros::PointCloudConcatenateFieldsSynchronizer::PointCloud |
Definition at line 56 of file concatenate_fields.h.
◆ PointCloudConstPtr
| typedef PointCloud::ConstPtr pcl_ros::PointCloudConcatenateFieldsSynchronizer::PointCloudConstPtr |
Definition at line 58 of file concatenate_fields.h.
◆ PointCloudPtr
| typedef PointCloud::Ptr pcl_ros::PointCloudConcatenateFieldsSynchronizer::PointCloudPtr |
Definition at line 57 of file concatenate_fields.h.
Constructor & Destructor Documentation
◆ PointCloudConcatenateFieldsSynchronizer() [1/2]
|
inline |
Empty constructor.
Definition at line 61 of file concatenate_fields.h.
◆ PointCloudConcatenateFieldsSynchronizer() [2/2]
|
inline |
Empty constructor.
- Parameters
-
queue_size the maximum queue size
Definition at line 66 of file concatenate_fields.h.
◆ ~PointCloudConcatenateFieldsSynchronizer()
|
inlinevirtual |
Empty destructor.
Definition at line 69 of file concatenate_fields.h.
Member Function Documentation
◆ input_callback()
| void pcl_ros::PointCloudConcatenateFieldsSynchronizer::input_callback | ( | const PointCloudConstPtr & | cloud | ) |
Definition at line 86 of file concatenate_fields.cpp.
◆ onInit()
|
virtual |
Reimplemented from nodelet_topic_tools::NodeletLazy.
Definition at line 47 of file concatenate_fields.cpp.
◆ subscribe()
|
virtual |
Implements nodelet_topic_tools::NodeletLazy.
Definition at line 72 of file concatenate_fields.cpp.
◆ unsubscribe()
|
virtual |
Implements nodelet_topic_tools::NodeletLazy.
Definition at line 79 of file concatenate_fields.cpp.
Member Data Documentation
◆ input_messages_
|
private |
The number of input messages that we expect on the input topic.
Definition at line 84 of file concatenate_fields.h.
◆ maximum_queue_size_
|
private |
The maximum number of messages that we can store in the queue.
Definition at line 87 of file concatenate_fields.h.
◆ maximum_seconds_
|
private |
The maximum number of seconds to wait until we drop the synchronization.
Definition at line 90 of file concatenate_fields.h.
◆ pub_output_
|
private |
The output PointCloud publisher.
Definition at line 81 of file concatenate_fields.h.
◆ queue_
|
private |
A queue for messages.
Definition at line 93 of file concatenate_fields.h.
◆ sub_input_
|
private |
The input PointCloud subscriber.
Definition at line 78 of file concatenate_fields.h.
The documentation for this class was generated from the following files: