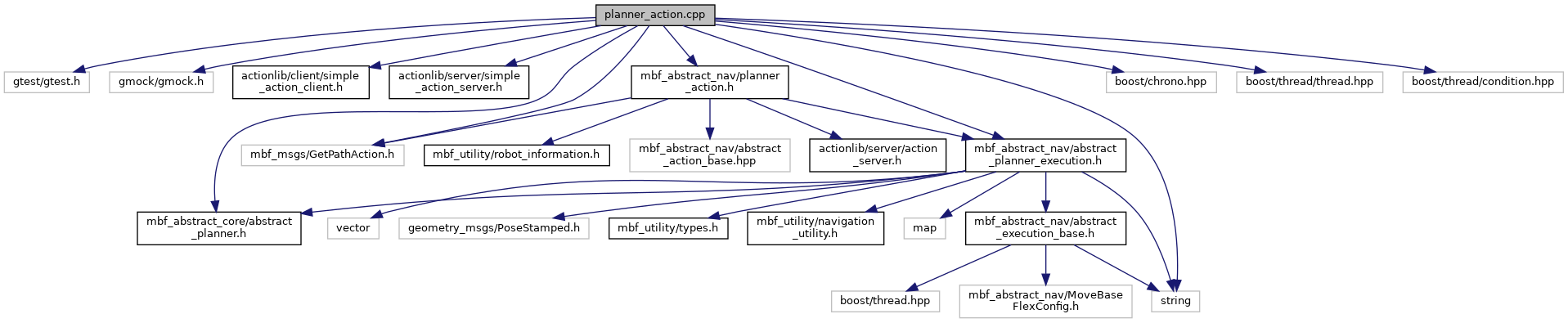
#include <gtest/gtest.h>
#include <gmock/gmock.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/server/simple_action_server.h>
#include <mbf_abstract_core/abstract_planner.h>
#include <mbf_msgs/GetPathAction.h>
#include <mbf_abstract_nav/planner_action.h>
#include <mbf_abstract_nav/abstract_planner_execution.h>
#include <boost/chrono.hpp>
#include <boost/thread/thread.hpp>
#include <boost/thread/condition.hpp>
#include <string>
Go to the source code of this file.
|
| | ACTION (SleepAndFail) |
| |
| | ACTION_P (Notify, cv) |
| |
| | EXPECT_CALL (action_server, publishResult(_, Field(&mbf_msgs::GetPathResult::outcome, Eq(mbf_msgs::GetPathResult::SUCCESS)))) .Times(1) .WillOnce(Notify(&done_condition_)) |
| |
| | for (size_t ii=0;ii !=path.size();++ii) |
| |
| int | main (int argc, char **argv) |
| |
| EXPECT_CALL * | planner (_, _, _, _, _, _)).WillOnce(DoAll(SetArgReferee< 3 >(path), Return(0)) |
| |
| | TEST_F (PlannerActionFixture, emptyPath) |
| |
| | TEST_F (PlannerActionFixture, noPathFound) |
| |
| | TEST_F (PlannerActionFixture, noRobotPose) |
| |
| | TEST_F (PlannerActionFixture, patExceeded) |
| |
| | TEST_F (PlannerActionFixture, tfError) |
| |
◆ ACTION()
◆ ACTION_P()
◆ EXPECT_CALL()
| EXPECT_CALL |
( |
action_server |
, |
|
|
publishResult(_, Field(&mbf_msgs::GetPathResult::outcome, Eq(mbf_msgs::GetPathResult::SUCCESS))) |
|
|
) |
| & |
◆ for()
| for |
( |
size_t |
ii = 0; ii != path.size(); ++ii | ) |
|
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
◆ planner()
◆ TEST_F() [1/5]
◆ TEST_F() [2/5]
◆ TEST_F() [3/5]
◆ TEST_F() [4/5]
◆ TEST_F() [5/5]
◆ frame_id
| goal goal start_pose header frame_id = goal->goal.target_pose.header.frame_id = global_frame |
◆ use_start_pose
| goal goal use_start_pose = true |